谷歌DeepMind机器人成果三连发!两大能力全提升,数据收集系统可同时管理20个机器人
 发布于2024-11-01 阅读(0)
发布于2024-11-01 阅读(0)
扫一扫,手机访问
几乎是和斯坦福“炒虾洗碗”机器人同一时间,谷歌DeepMind也发布了最新具身智能成果。
并且是三连发:
先是一个主打提高决策速度的新模型,让机器人的操作速度(相比原来的Robotics Transformer)提高了14%——快的同时,质量也没有下滑,准确度还上升了10.6%。
然后再来一个专攻泛化能力的新框架,可以给机器人创建运动轨迹提示,让它面对41项从未见过的任务,取得了63%的成功率。
别小看这个数组,对比之前的29%,进步可谓相当大。
最后是一个机器人数据收集系统,可以一次管理20个机器人,目前已从它们的活动中收集了77000次实验数据,它们将帮助谷歌更好地完成后续训练工作。
那么,这三个成果具体是什么样?我们一个一个来看。
机器人日常化第一步:没见过的任务也能直接做
谷歌指出,要实现真正可进入现实世界的机器人,需要解决两个基本挑战。
1、新任务推广能力
2、提高决策速度
本次三连发的前两项成果就主要在这两大领域作出改进,且都建立在谷歌的基础机器人模型Robotics Transformer(简称RT)之上。
首先来看第一个:帮助机器人泛化的RT-Trajectory。
对于人类来说,譬如完成擦桌子这种任务简直再好理解不过了,但机器人却不是很懂。
不过好在我们可以通过多种可能的方式将这一指令传达给它,让它作出实际的物理行动。
一般来说,传统的方式就是将任务映射为一个个特定的动作,然后让机械臂完成,例如对于擦桌子,就可以拆解为“合上夹具、向左移动、向右移动”。
很明显,这种方式的泛化能力很差。
在此,谷歌新提出的RT-Trajectory通过给机器人提供视觉提示的方法来教它完成任务。
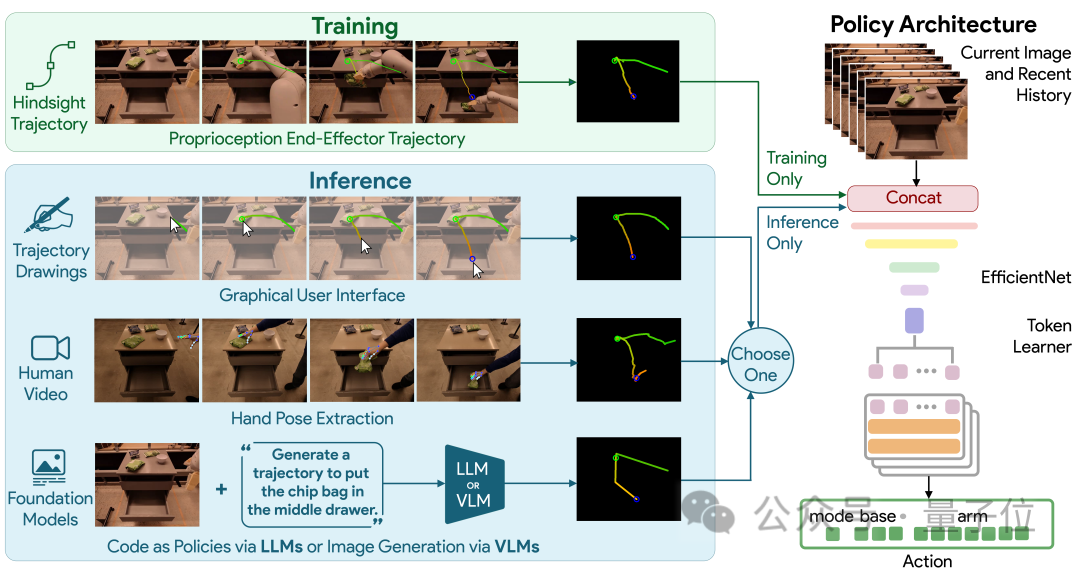
具体而言,由RT-Trajectory控制的机器人在训练时会加入2D轨迹增强的数据。
这些轨迹以RGB图像的形式呈现,包括路线和关键点,在机器人学习执行任务时提供低级但非常实用的提示。
有了这个模型,机器人执行从未见过的任务的成功率直接提高了1倍之多(相比谷歌的基础机器人模型RT-2,从29%=>63%)。
更值得一提的是,RT-Trajectory可以用多种方式来创建轨迹,包括:
通过观看人类演示、接受手绘草图,以及通过VLM(视觉语言模型)来生成。
机器人日常化第二步:决策速度一定要快
泛化能力上来以后,我们再来关注决策速度。
谷歌的RT模型采用的是Transformer架构,虽然Transformer功能强大,但严重依赖于有着二次复杂度的注意力模块。
因此,一旦RT模型的输入加倍(例如给机器人配上更高分辨率的传感器),处理起来所需的计算资源就会增加为原来的四倍,这将严重减慢决策速度。
为了提高机器人的速度,谷歌在基础模型Robotics Transformer上开发了SARA-RT。
SARA-RT使用一种新的模型微调方法让原来的RT模型变得更为高效。
这种方法被谷歌称之为“向上训练”,它主要的功能就是将原来的二次复杂度转换为线性复杂度,同时保持处理质量。
将SARA-RT应用于具有数十亿参数的RT-2模型时,后者可以在各种任务上实现更快的操作速度以及更高的准确率。
同样值得一提的是,SARA-RT提供的是一种通用的加速Transformer的方法,且无需进行昂贵的预训练,因此可以很好地推广开来。
数据不够?自己创造
最后,为了帮助机器人更好地理解人类下达的任务,谷歌还从数据下手,直接搞了一个收集系统:AutoRT。
这个系统将大模型(包括LLM和VLM)与机器人控制模型(RT)相结合,不断地指挥机器人去执行现实世界中的各种任务,从而产生数据并收集。
具体流程如下:
让机器人“自由”接触环境,靠近目标。
然后通过摄像头以及VLM模型来描述眼前的场景,包括具体有哪些物品。
接着,LLM就通过这些信息来生成几项不同的任务。
注意了,生成以后机器人并不马上执行,而是利用LLM再过滤一下哪些任务可以独立搞定,哪些需要人类远程控制,以及哪些压根不能完成。
像不能完成的就是“打开薯片袋”这种,因为这需要两只机械臂(默认只有1只)。
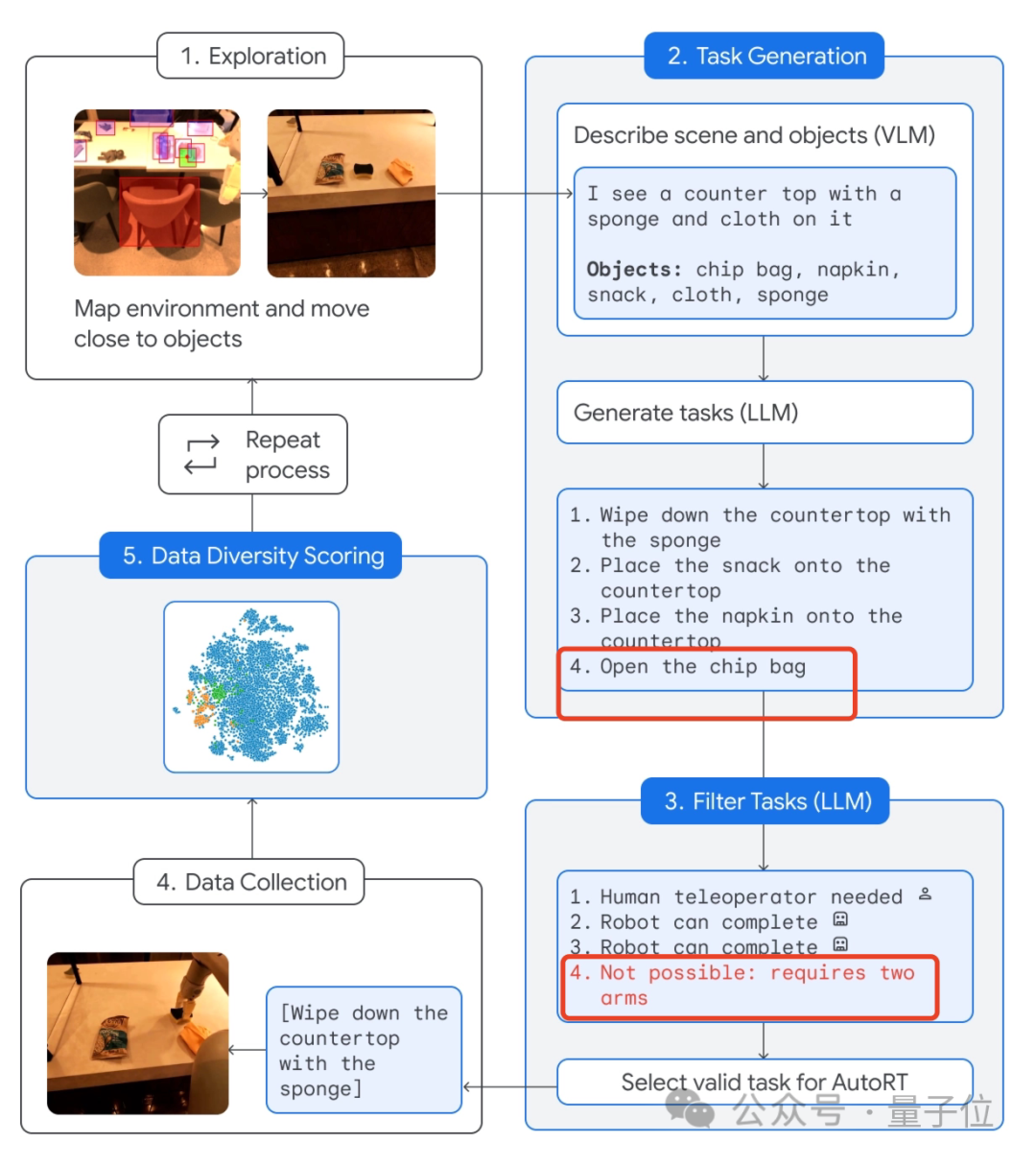
再然后,做完这个筛选任务以后,机器人就可以去实际执行了。
最后由AutoRT系统完成数据收集并进行多样性评估。
据介绍,AutoRT可一次同时协调多达20个机器人,在7个月的时间内,一共收集了包括6650个独特任务在内的77000次试验数据。
最后,对于此系统,谷歌还特别强调了安全性。
毕竟AutoRT的收集任务作用于现实世界,“安全护栏”不能少。
具体而言,基础安全守则由为机器人进行任务筛选的LLM提供,它的部分灵感来自艾萨克·阿西莫夫的机器人三定律——首先也是最重要的是“机器人不得伤害人类。
其次还包括要求机器人不得尝试涉及人类、动物、尖锐物体或电器的任务。
但这还远远不够。
因此AutoRT还配有常规机器人技术中的多层实用安全措施。
例如,机器人在其关节上的力超过给定阈值时自动停止、所有行动都可由保持在人类视线范围内的物理开关停止等等。

还想进一步了解谷歌的这批最新成果?
好消息,除了RT-Trajectory只上线论文以外,其余都是代码和论文一并公布,欢迎大家进一步查阅~
One More Thing
说起谷歌机器人,就不得不提RT-2(本文的所有成果也都建立之上)。
这个模型由54位谷歌研究员耗时7个月打造,今年7月底问世。
嵌入了视觉-文本多模态大模型VLM的它,不仅能理解“人话”,还能对“人话”进行推理,执行一些并非一步就能到位的任务,例如从狮子、鲸鱼、恐龙这三个塑料玩具中准确捡起“已灭绝的动物”,非常惊艳。

如今的它,在短短5个多月内便迎来了泛化能力和决策速度的迅速提升,不由地让我们感叹:不敢想象,机器人真正冲进千家万户,究竟会有多快?
产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- 微软再次发布修复Win11中Defender LSA误报问题的KB5007651更新
- 7月5日消息,微软在昨日对微软健康中心页面进行了更新,并宣布将于7月5日针对Win11Version21H2/22H2版本发布KB5007651(版本1.0.2306.10002)更新,旨在进一步解决LSA误报问题。根据我们从微软健康中心页面获得的信息,LSA误报问题的时间表如下:今年3月,微软发布了KB5007651更新(版本号1.0.2302.21002),该更新要求用户强制安装。然而,一些用户报告称在安装该更新后,WindowsSecurity显示“LocalSecurityauthoritypro
- 6分钟前 微软 0
-
 正版软件
正版软件
- 理想汽车 Mind GPT 大模型通过国家备案,训练数据规模达 3 万亿 Token
- 本网站3月28日消息,理想汽车宣布,全自研多模型认知大模型MindGPT正式通过国家《生成式人工智能服务管理暂行办法》备案,成为首个通过该备案的汽车厂商自研大模型。据介绍,MindGPT是在汽车智能座舱落地的全自研多模态认知大模型,训练数据规模达3万亿Token。理想汽车称:Mind+GPT是一个可以使用的大模型,也是行业唯一一个不需要任何指令词就可以使用的大模型,也是行业唯一一个真正围绕车载场景打造的大模型。它仍然拥有听觉和执行能力全面进化的理念同学,支持方言自由说、指令自由说、简洁模式以及全时全车免唤
- 21分钟前 大数据 理想 Mind 0
-
 正版软件
正版软件
- 华为三折屏手机即将面世,预计二季度亮相市场
- 近日,中国国家知识产权局披露了一项名为“折叠屏设备”的专利,这项专利引起了业界的广泛关注。有消息称,该专利为华为一项研发全新的“三折屏手机”,已经启动大规模的备货流程,预计最快在今年第二季度与广大消费者见面。据悉,该款产品具有独特的折叠屏设计,不仅能够折叠成小巧的手机尺寸,也能展开成为平板电脑,具有非常广阔的应用空间。该产品的推出必将引领手机行业的创新潮流,也将满足广大消费者对于科技产品的新需求。这项专利技术的研发工作已历经多年。华为作为这一领域的领先技术研发公司,早在几年前就开始布局这一领域,并在202
- 36分钟前 华为 0
-
 正版软件
正版软件
- 智己汽车刘涛预热智己L6:四驱超强续航,固态电池更安全
- 智己汽车CEO刘涛今日在社交媒体上为即将推出的智己L6进行了预热,吸引了众多消费者的关注。刘涛透露,智己L6将采用行业首创的超快充固态电池,基于准900V超强性能平台开发。这一技术使得该车的续航里程超过了1000公里,为电动汽车市场树立了新的标杆,有效解决了消费者对续航能力的担忧。智己L6不仅在续航方面取得了重大突破,同时还将引入四驱版车型设计,这意味着驾驶者将能够体验到超长续航和强劲动力带来的卓越性能。这一成就得益于智己汽车在电池技术方面的创新进步。智己L6搭载的超快充固态电池采用了纳米级固态电解质等独
- 51分钟前 智己汽车 0
-
 正版软件
正版软件
- 2024年2月中国大陆电竞显示器市场逆势增长,销量同比大涨36.4%
- 3月26日消息,洛图科技(RUNTO)最新报告揭示了一个令人振奋的趋势:2024年2月,尽管受到春节假期错位导致的整体显示器市场销量下滑影响,中国大陆电竞显示器线上市场却呈现出强劲的增长态势。数据显示,该月电竞显示器销量达到42万台,同比增长高达36.4%,其中,电竞市场的增长更是超过了30%,明显优于整体市场表现。2024年2月中国大陆电竞显示器线上市场TOP品牌销量及变化报告进一步分析了电竞显示器市场的品牌竞争格局。在这个月中,AOC、HKC和SANC三大品牌继续稳坐销量前三的宝座,显示出强大的市场影
- 1小时前 14:10 显示器 0
最新发布
-
 1
1
- 阿里追捧的中台,“热度”退了?
- 1839天前
-
 2
2
- Overture设置踏板标记的方法
- 1676天前
-
 3
3
- 思杰马克丁取得CleanMyMac中国区独家发行授权
- 1666天前
-
 4
4
- IBM:20万台Mac让公司职工在工作中更快乐 更多产
- 1864天前
-
 5
5
- 报道称微软一直在悄然游说反对“维修权”立法!
- 1830天前
-
 6
6
- 美国怀疑华为窃取商业机密 华为:身正不怕影子斜
- 1826天前
-
 7
7
- 三星被曝正与联发科接洽 A系列手机有望搭载其5G芯片
- 1841天前
-
 8
8
- 环球墨非完成千万级融资 联合企业集团投资
- 1862天前
-
 9
9
相关推荐
- 微软再次发布修复Win11中Defender LSA误报问题的KB5007651更新
- 理想汽车 Mind GPT 大模型通过国家备案,训练数据规模达 3 万亿 Token
- 华为三折屏手机即将面世,预计二季度亮相市场
- 智己汽车刘涛预热智己L6:四驱超强续航,固态电池更安全
- 2024年2月中国大陆电竞显示器市场逆势增长,销量同比大涨36.4%
- 快狗打车 2023 年收入 7.53 亿元同比下降 2.6%,经调亏损收窄 25.6%
- 民航局:我国实名登记无人机超 126 万架,同比增长 32.2%
- 小米SU7系列新车震撼上市,SU7 Pro版本成焦点!
- 谷歌更新Transformer架构,更节省计算资源!50%性能提升
热门关注
-

- Xshell 6 简体中文
- ¥899.00-¥1149.00
-

- DaVinci Resolve Studio 16 简体中文
- ¥2550.00-¥2550.00
-

- Camtasia 2019 简体中文
- ¥689.00-¥689.00
-

- Luminar 3 简体中文
- ¥288.00-¥288.00
-

- Apowersoft 录屏王 简体中文
- ¥129.00-¥339.00