抗干扰框架ADMap:实现在线矢量化高精地图重建
 发布于2024-11-26 阅读(0)
发布于2024-11-26 阅读(0)
扫一扫,手机访问
- 论文链接:https://arxiv.org/pdf/2401.13172.pdf
- 代码链接:https://github.com/hht1996ok/ADMap
摘要
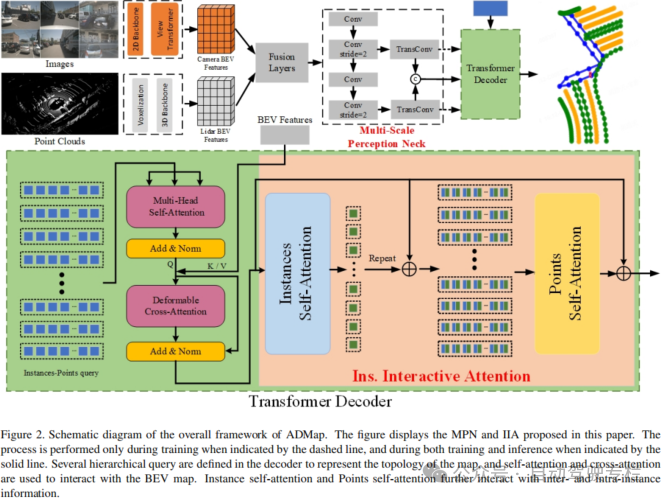
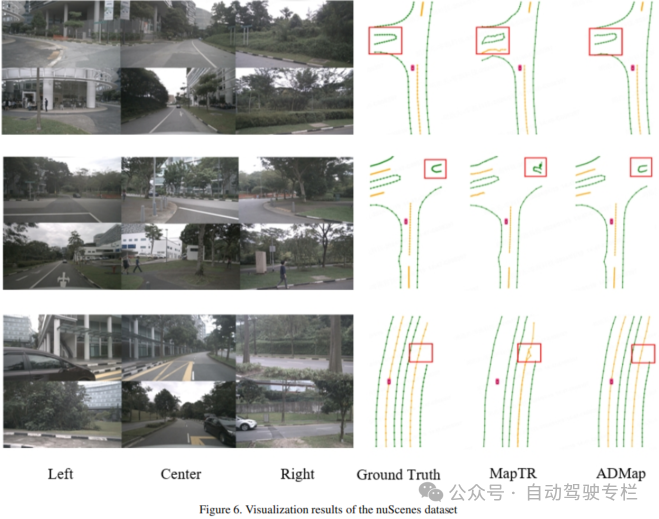
本文介绍了ADMap,这是一种用于重建在线矢量化高精地图的抗干扰框架。在自动驾驶领域,高精地图的在线重建对于规划任务至关重要。近年来,已经有多种高性能的高精地图重建模型被开发出来以满足这一需求。然而,由于存在预测偏差,实例向量内的点序列可能会出现抖动或锯齿状,进而影响后续任务的进行。为此,本文提出了抗干扰地图重建框架ADMap。 ADMap框架由三个模块组成,分别是多尺度感知neck(MPN)、实例交互注意力(IIA)和矢量方向差损失(VDDL)。通过级联方式探索实例之间和实例内部的点序关系,该模型能够更有效地监测点序预测过程,从而缓解点序抖动的问题。 实验证明,ADMap在nuScenes和Argoverse2数据集上实现了最先进的性能。大量的结果表明,在复杂且多变的驾驶场景中,ADMap能够生成稳定且可靠的地图元素。这对于自动驾驶系统的安全和准确性至关重要。 总的来说,ADMap是一种创新的抗干扰地图重建框架,它能够有效地解决点序抖动问题,并在实际数据集上展现出卓越的性能。这一研究对于推动自动驾驶技术的发展具有重要的意义。
主要贡献
本文的贡献如下:
1)本文提出了端到端ADMap,它可以重建更稳定的矢量化高精地图;
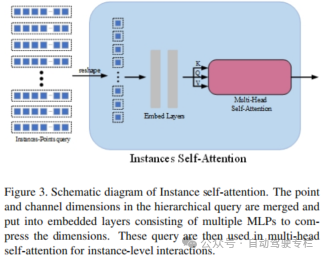
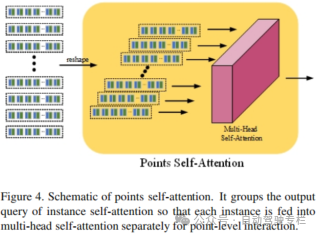
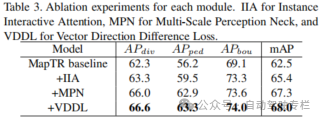
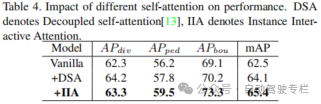
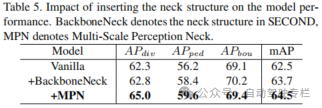
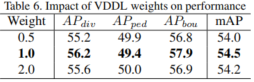
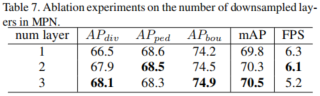
MPN通过不增加计算资源的方式,能够更精确地捕获多尺度信息。而IIA则有效地实现了实例之间和实例内部信息的交互,从而缓解了实例点位置偏移的问题。另外,VDDL利用拓扑信息来监督point-order位置的重建过程,并且对矢量方向差进行建模。
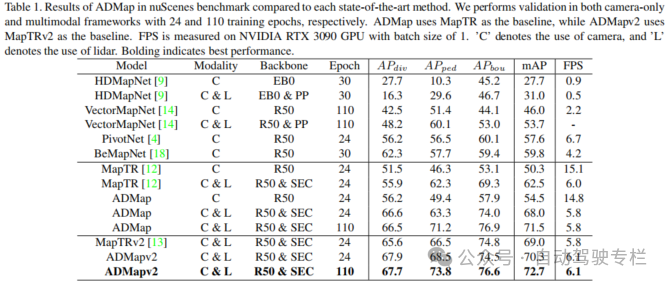
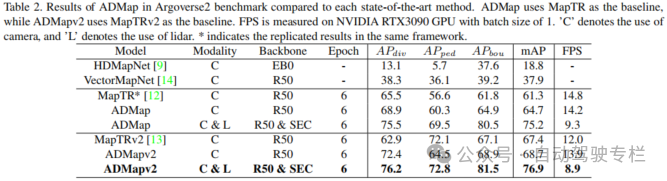
3)ADMap能够实时重建矢量化高精地图,并且在nuScenes和Argoverse2基准测试中实现了最佳性能。
论文图片和表格


总结
ADMap是一种有效且高效的矢量化高精地图重建框架,其通过多尺度感知Neck、实例交互注意力和矢量方向差损失这三个模块,有效地缓解了由实例点抖动造成的地图拓扑失真问题。大量实验表明,本文所提出的方法能够在nuScenes和Argoverse2基准上获得最佳性能,其高效性也得以验证。我们相信,ADMap可以帮助社区推动有关矢量化高精地图重建任务的研究,以更好地发展自动驾驶等领域。

原文链接:https://mp.weixin.qq.com/s/O0BoiJZwIQmeeChUZkMMng
产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- 广汽埃安跻身全球独角兽榜单,估值达千亿
- 4月11日消息,胡润百富于近日公布了《2024全球独角兽》排行榜。据榜单披露,全球在过去的一年里催生出171家新的独角兽企业,美国新增70家,而中国则新增了56家,显示了两国在全球创新领域的领跑地位。中国新能源汽车企业广污埃安也跻身此榜单中,其估值高达1000亿元,一跃成为全球最大的新能源汽车独角兽。相比于去年,广污埃安的估值在全球独角兽排名中上升了3个名次,位列全球第25,中国区域则排在第10。广汽埃安的崛起并非偶然,据小编了解,这与其卓越的市场表现和强劲的销售数据密不可分。根据行业报告,去年广汽埃安的
- 3分钟前 埃安 0
-
 正版软件
正版软件
- xem币有前景吗
- XEM币的前景取决于以下因素:NEM平台采用率、链上交易数量、竞争环境、监管环境和市场情绪。
- 13分钟前 0
-
 正版软件
正版软件
- gate.io怎么修改资金密码
- 修改Gate.io资金密码需要以下步骤:登录并前往资金管理页面。输入2FA验证码并确认。创建新密码(至少8个字符,含数字和特殊字符)。提交更改。再次输入新密码验证。修改成功,妥善保管新密码。
- 28分钟前 0
-
 正版软件
正版软件
- shib币哪里可以交易
- Shib币交易平台众多,包括中心化交易所(如Binance、Coinbase)和去中心化交易所(如Uniswap、SushiSwap),此外还有部分钱包(如MetaMask、TrustWallet)支持Shib币交易。在选择平台时,应考虑安全性、交易手续费、可用性和流动性以及用户体验等因素。
- 43分钟前 0
-
 正版软件
正版软件
- btc最多钱包地址
- Binance拥有最多的比特币钱包地址,超过1000万个。其他拥有大量比特币地址的平台和机构包括Coinbase、Kraken、Huobi和BitMEX。
- 58分钟前 0
最新发布
-
 1
1
- 阿里追捧的中台,“热度”退了?
- 1882天前
-
 2
2
- Overture设置踏板标记的方法
- 1719天前
-
 3
3
- 思杰马克丁取得CleanMyMac中国区独家发行授权
- 1709天前
-
 4
4
- IBM:20万台Mac让公司职工在工作中更快乐 更多产
- 1907天前
-
 5
5
- 报道称微软一直在悄然游说反对“维修权”立法!
- 1873天前
-
 6
6
- 美国怀疑华为窃取商业机密 华为:身正不怕影子斜
- 1869天前
-
 7
7
- 三星被曝正与联发科接洽 A系列手机有望搭载其5G芯片
- 1884天前
-
 8
8
- 环球墨非完成千万级融资 联合企业集团投资
- 1906天前
-
 9
9
相关推荐
热门关注
-

- Xshell 6 简体中文
- ¥899.00-¥1149.00
-

- DaVinci Resolve Studio 16 简体中文
- ¥2550.00-¥2550.00
-

- Camtasia 2019 简体中文
- ¥689.00-¥689.00
-

- Luminar 3 简体中文
- ¥288.00-¥288.00
-

- Apowersoft 录屏王 简体中文
- ¥129.00-¥339.00