应对复杂自主操控任务,伯克利开发高质量大型机器人操控基准不再困难
 发布于2024-11-27 阅读(0)
发布于2024-11-27 阅读(0)
扫一扫,手机访问
项目主页:https://functional-manipulation-benchmark.github.io/ 论文地址:https://arxiv.org/abs/2401.08553 论文题目:FMB: a Functional Manipulation Benchmark for Generalizable Robotic Learning 共同第一作者主页:https://people.eecs.berkeley.edu/~jianlanluo/ https://charlesxu0124.github.io/
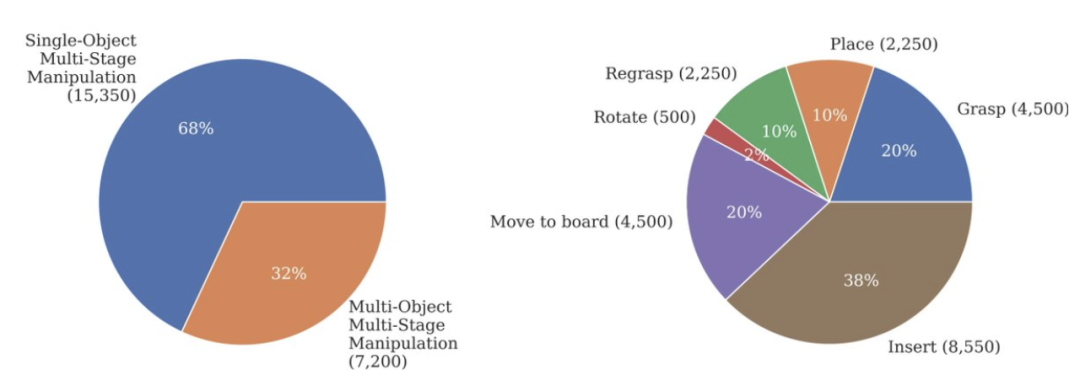
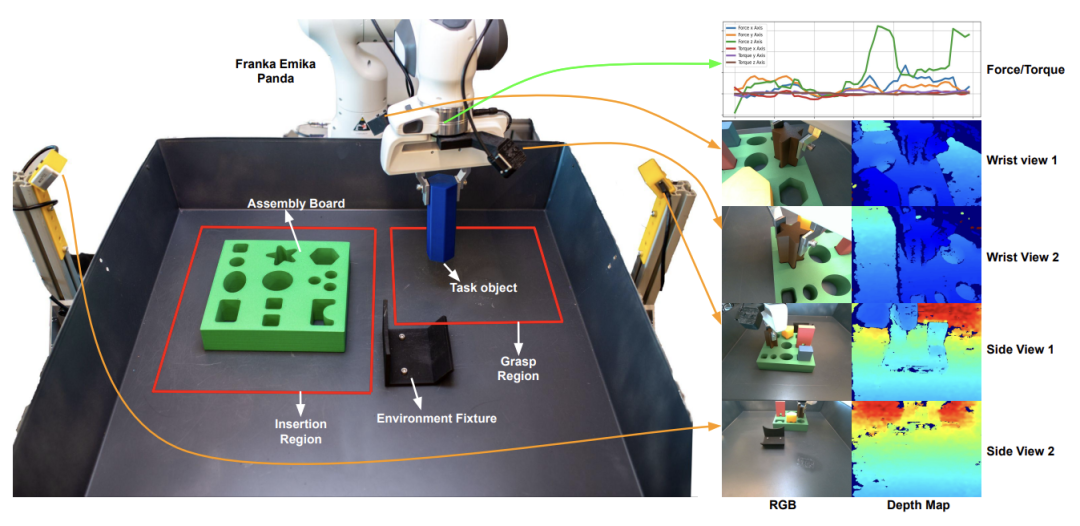
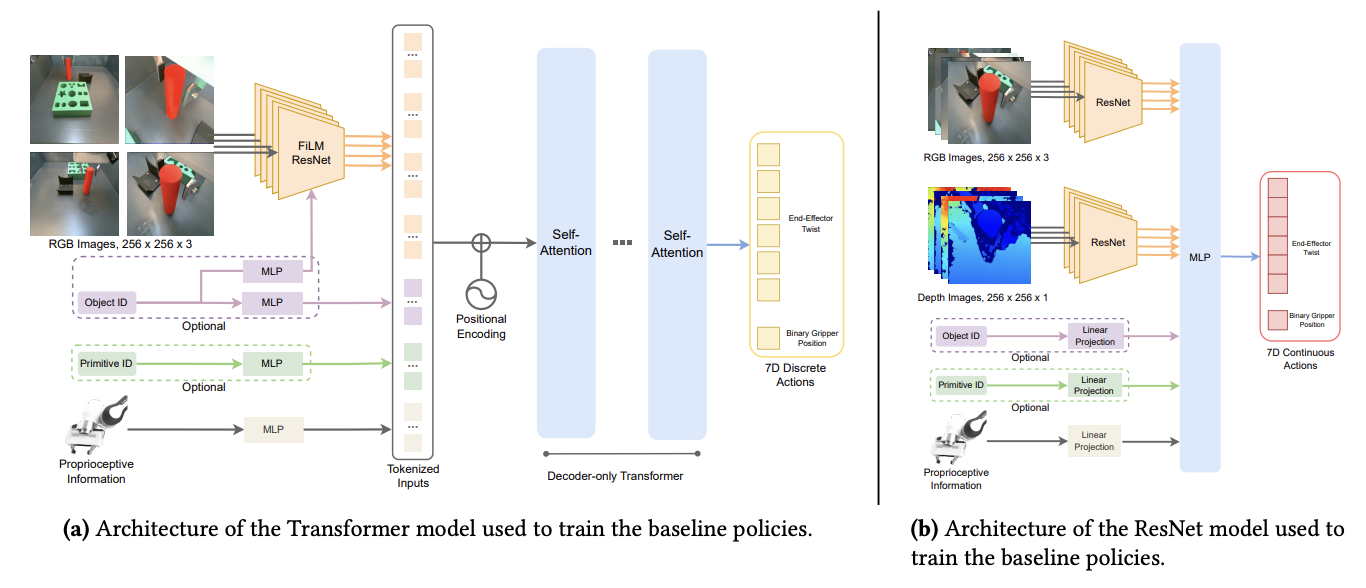
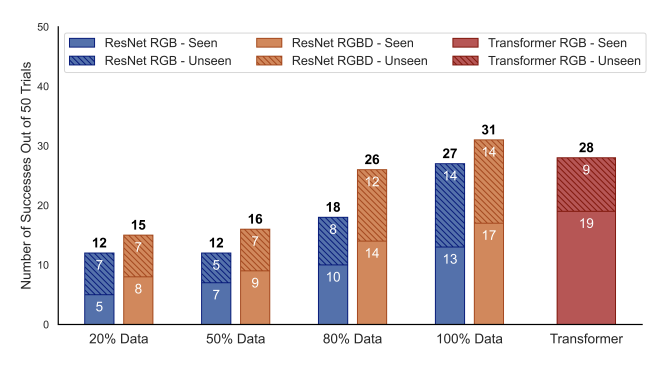
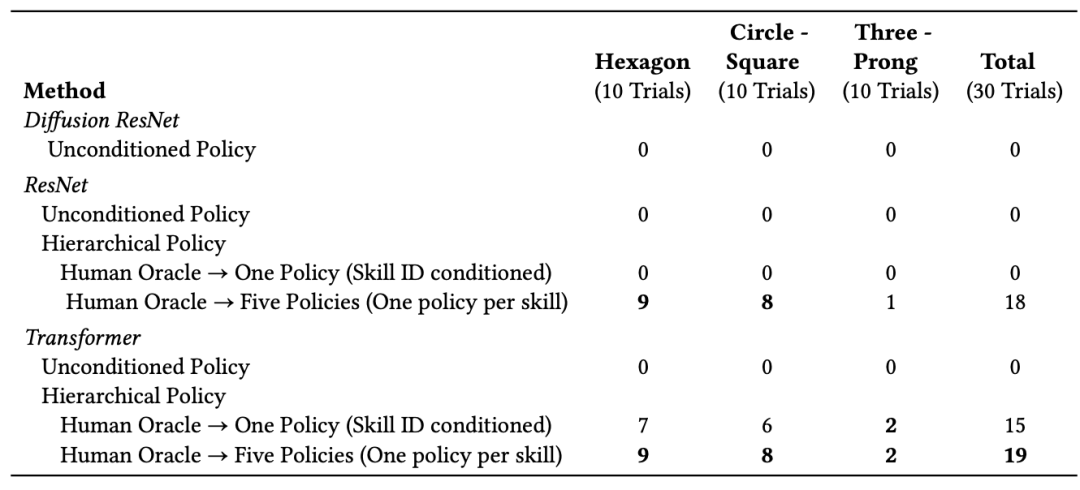
创新设计:采用了 3D 打印技术制作任务中的物体,来考验机器人的泛化能力,这种方法也便于其他研究人员复现。 多样化任务:包含单物体和多物体多阶段操控任务,真实模拟日常环境中的挑战。 大型数据集:通过大量人工演示,为机器人提供了丰富的数据集。 模仿学习基线:使用最先进的机器学习方法,提供了基线结果和模块化组件以供其他研究者使用。
本文转载于:https://www.jiqizhixin.com/articles/2024-01-31-2 如有侵犯,请联系admin@zhengruan.com删除
产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- 五菱汽车推出全新商用车“五菱扬光”搭载红1号电池,引起轰动
- 五菱汽车今日发布全新一代新能源商用车五菱扬光,进一步布局新能源领域。这款全新车型是基于五菱全新原生新能源平台打造的首款商用车,其中最引人注目的亮点是首次搭载的“五菱红1号”电池。该电池采用了前沿技术,仅需30分钟即可将电量从30%充至80%,大大提高了充电效率。此外,该电池还配备了智能感应系统,能够精确控制电池温度,以确保在各种环境下的稳定运行。这些创新设计使得这款商用车成为了一款高效、可靠的交通工具。五菱扬光在外观设计上与五菱荣光燃油版相似,但采用了盲窗设计,突出了货运特性。车身尺寸为4985*1800
- 12分钟前 五菱 0
-
 正版软件
正版软件
- 全面了解三星Galaxy Fit3健身手环的规格和升级亮点
- 1月31日消息,三星官网意外曝光了GalaxyFit3健身手环的详细规格和外观图片,引发了消费者的广泛关注。根据报道,新款GalaxyFit3的尺寸为93x9.5x24毫米,相对于前代产品做了一些微调。外壳提供了灰色、银色和粉金色三种配色选项,以满足不同用户的个性化需求。表带采用柔韧的橡胶材质,提供了深绿色和橙色两种选择,既确保了佩戴的舒适度,又展现了时尚的风格。根据小编了解,三星官网此次曝光的信息虽然有限,但据先前的消息透露,GalaxyFit3将配备一块1.61英寸的屏幕。相较于前代的1.1英寸屏幕,
- 22分钟前 三星 0
-
 正版软件
正版软件
- 深蓝G318强悍SUV公开官方图,预计价格为30万元,配备丰富的原装扩展件
- 深蓝汽车最新发布了全新硬派SUV“G318”的官方照片。据悉,这款车型将在未来上市,预计售价约为30万元。新车的独特外观设计和丰富的功能配置已经引起了广大消费者的关注。G318提供三种配色方案:银河、深灰色和绿色,以满足消费者的个性化需求。新车采用别具一格的“方盒子”造型,在外观设计上与其他硬派SUV相比,深蓝G318更具辨识度,展现独特的个性和时尚魅力。据小编了解,深蓝G318在装备方面同样表现出色。新车配备了丰富的原厂拓展件,包括行李架、前照灯、电动踏板、背包行囊、备胎等,不仅提升了实用性,也为用户提
- 37分钟前 长安深蓝 0
-
 正版软件
正版软件
- 小米MIX Fold "如意"四折手机曝光,全球销售计划启动
- 科技媒体gsmchina最近在深入挖掘MiCode时,意外地发现了关于小米即将推出的折叠屏手机小米MIXFold4的线索。据悉,这款设备的内部代号是“Ruyi”(中文意为如意),内部型号定为N8。预计它将搭载业界领先的高通骁龙8Gen3处理器,这意味着它将具备卓越的性能表现。这一发现引发了人们对小米MIXFold4的期待,希望它能够在折叠屏手机市场中带来更多创新与惊喜。根据gsmchina的报道,小米计划于今年5月在国内市场发布MIXFold4折叠屏手机,并计划在俄罗斯、土耳其等国际市场上架销售。这对小米
- 52分钟前 小米 0
-
 正版软件
正版软件
- 小米MIX Fold 4将在五月搭载骁龙8处理器震撼亮相!
- 小米公司即将发布一款全新横向折叠屏手机——MIXFold4。据爆料,该款新机的内部型号为N8,代号为“Ruyi”(如意),不仅在设计上寓意着顺心如意,还在技术和性能上带来了多项创新。这将成为折叠屏手机市场的一员。MIXFold4预计将于今年5月份正式与消费者见面。新机将搭载第三代骁龙8处理器,提供更强劲的性能体验。除此之外,MIXFold4在细节处理上也下了一番功夫,采用了实体侧边指纹识别方案,以确保使用的便捷性和安全性。摄像头配置方面,MIXFold4进行了全面升级,配备了四摄潜望双焦段系统,并引入了新
- 1小时前 10:40 小米 0
最新发布
-
 1
1
- 阿里追捧的中台,“热度”退了?
- 1813天前
-
 2
2
- Overture设置踏板标记的方法
- 1650天前
-
 3
3
- 思杰马克丁取得CleanMyMac中国区独家发行授权
- 1640天前
-
 4
4
- IBM:20万台Mac让公司职工在工作中更快乐 更多产
- 1838天前
-
 5
5
- 报道称微软一直在悄然游说反对“维修权”立法!
- 1804天前
-
 6
6
- 美国怀疑华为窃取商业机密 华为:身正不怕影子斜
- 1800天前
-
 7
7
- 三星被曝正与联发科接洽 A系列手机有望搭载其5G芯片
- 1815天前
-
 8
8
- 环球墨非完成千万级融资 联合企业集团投资
- 1836天前
-
 9
9
相关推荐
- 五菱汽车推出全新商用车“五菱扬光”搭载红1号电池,引起轰动
- 全面了解三星Galaxy Fit3健身手环的规格和升级亮点
- 深蓝G318强悍SUV公开官方图,预计价格为30万元,配备丰富的原装扩展件
- 小米MIX Fold "如意"四折手机曝光,全球销售计划启动
- 小米MIX Fold 4将在五月搭载骁龙8处理器震撼亮相!
- 宏碁发布全新的掠夺者战斧 18 游戏本:搭载 i9-14900HX + RTX 4090,售价为25999 元
- 2023年全球量子初创企业风投金额降低50%,美国地区跌幅达80%
- IT之家公布 2023 年科技趋势榜单:微星笔记本获得多项领导、创新、前沿、推荐大奖
- 腾讯与字节跳动合作,推出《英雄联盟》抖音直播功能
热门关注
-

- Xshell 6 简体中文
- ¥899.00-¥1149.00
-

- DaVinci Resolve Studio 16 简体中文
- ¥2550.00-¥2550.00
-

- Camtasia 2019 简体中文
- ¥689.00-¥689.00
-

- Luminar 3 简体中文
- ¥288.00-¥288.00
-

- Apowersoft 录屏王 简体中文
- ¥129.00-¥339.00