成功突破:CMUÐ研发出敏捷性卓越的机器狗,以高速穿越障碍为特长,保持速度与安全的完美平衡!
 发布于2024-11-29 阅读(0)
发布于2024-11-29 阅读(0)
扫一扫,手机访问
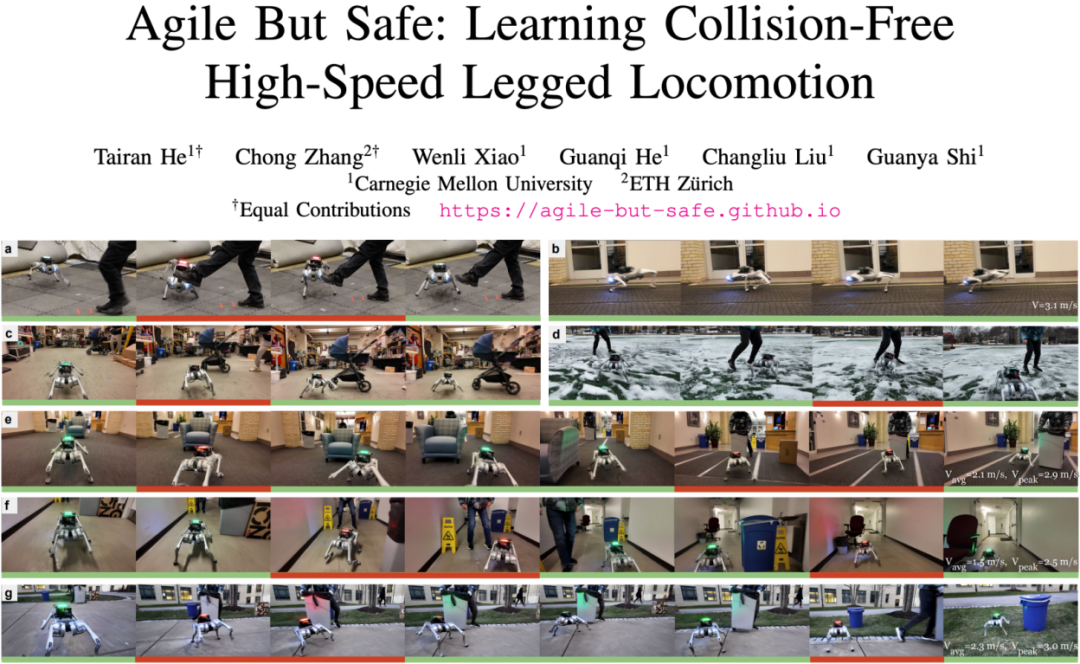
CMU和ETH Zurich团队合作开发了名为"敏捷但安全"(ABS)的新框架,为四足机器人在复杂环境中实现高速运动提供了解决方案。该框架不仅在避免碰撞方面表现出高效能力,而且实现了前所未有的3.1毫秒极速运动。这一创新为足式机器人领域带来了新的进展。
在高速机器人运动领域,同时保持速度和安全性一直是一个巨大的挑战。然而,卡内基梅隆大学(CMU)和苏黎世联邦理工学院(ETH)的研究团队最近取得了突破性进展。他们开发的全新四足机器人算法不仅能够快速移动于复杂环境中,还能巧妙地避开障碍物,真正实现了“敏捷且安全”的目标。这项算法的创新之处在于它能够快速地识别和分析周围环境,并根据实时数据做出智能决策。通过使用先进的传感器和强大的计算能力,机器人能够准确地感知周围的障碍物,并通过调整步态和轨迹来避开它们。这项技术的成功应用将极大地推动高速机器人的发展
论文地址: https://arxiv.org/pdf/2401.17583.pdf
在 ABS 的加持下,机器狗在各种场景下都展现出了惊艳的高速避障能力:
障碍重重的狭窄走廊:
凌乱的室内场景:
无论是草地还是户外,静态或动态障碍,机器狗都从容应对:
遇见婴儿车,机器狗灵巧躲闪开:
警告牌、箱子、椅子也都不在话下:
对于突然出现的垫子和人脚,也能轻松绕过:
机器狗甚至还可以玩老鹰捉小鸡:
ABS 突破性技术:
RL+ Learning model-free Reach-Avoid value
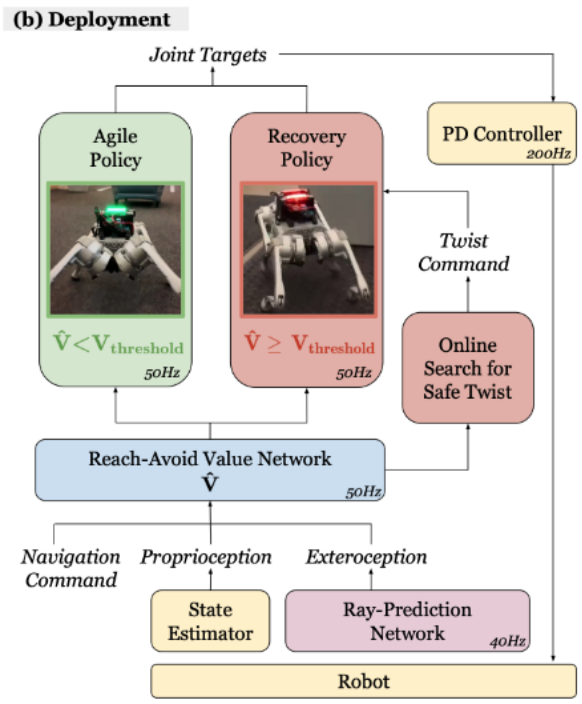
ABS 采用了一种双策略(Dual Policy)设置,包括一个「敏捷策略」(Agile Policy)和一个「恢复策略」(Recovery Policy)。敏捷策略让机器人在障碍环境中快速移动,而一旦 Reach-Avoid Value Estimation 检测到潜在危险(比如突然出现的婴儿车),恢复策略就会介入,确保机器人安全。
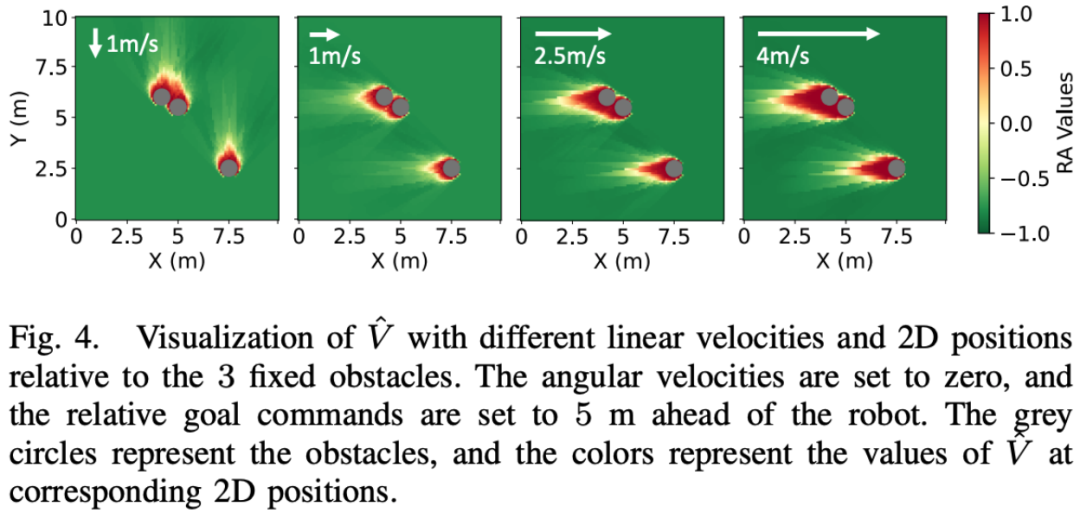
下图展示了针对特定障碍物集合学习到的 RA(达防)值。随着机器人速度的变化,RA 值的分布景观也相应变化。RA 值的符号合理地指示了敏捷策略的安全性。换句话说,这张图通过不同的 RA 值展示了机器人在不同速度下,面对特定障碍物时的安全风险程度。RA 值的高低变化反映了机器人在不同状态下执行敏捷策略时可能遇到的安全风险。
恢复策略的创新之处在于,它能使四足机器人快速追踪线速度和角速度指令,作为一种备用保护策略。与敏捷策略不同,恢复策略的观测空间专注于追踪线速度和角速度命令,不需要外部感知信息。恢复策略的任务奖励专注于线性速度追踪、角速度追踪、保持存活和保持姿势,以便平滑切换回敏捷策略。这种策略的训练同样在仿真环境中进行,但有特定的域随机化和课程设置,以更好地适应可能触发恢复策略的状态。这种方法为四足机器人提供了在高速运动中快速应对潜在失败的能力。
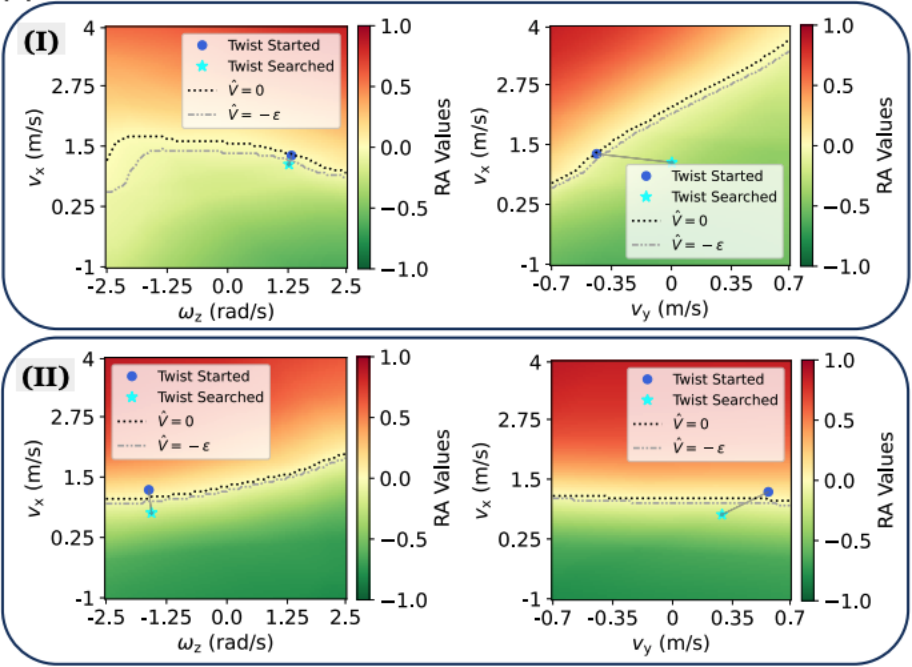
下图展示了当恢复策略在两个特定情况(I 和 II)下被触发时,RA(达防)值景观的可视化展示。这些可视化展示是在 vx(沿 x 轴的速度)与 ωz(绕 z 轴的角速度)平面以及 vx 与 vy(沿 y 轴的速度)平面上进行的。图中显示了搜索前的初始旋转状态(即机器人基座当前的旋转状态)和通过搜索得到的命令。简单来说,这些图表展示了在特定条件下,通过恢复策略搜索得到的最佳运动指令,以及这些指令如何影响 RA 值,从而反映机器人在不同运动状态下的安全性。

产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- IT运维管理:无论是基础设施还是数据管理都要精通
- AI大模型时代,数据赋予IT人“新使命”当下IT人在企业中扮演着运营支撑的角色。说到运维管理,相信每人都是一把辛酸泪,每天承担着繁琐、高负荷且又高风险的运维工作,但在业务规划和职业发展时又成为了“透明人”。业内有句调侃的话:“只花钱的人,不配拥有发言权”。随着AI大模型应用的普及,数据成为了企业的关键资产和核心竞争力。近年来,企业的数据规模快速增长,从PB级向百PB级成倍数增加。数据类型也从以数据库为主的结构化数据,逐渐演变为以文件、日志、视频等为主的半结构化、非结构化数据。为了满足业务部门的需求,数据存
- 刚刚 数据 AI 0
-
 正版软件
正版软件
- 奈飞继续进军古装悬疑剧市场,收购《大唐狄公案》和《长安十二时辰》后发布新作品
- 奈飞已购买《大唐狄公案》电视剧的播出权,通过奈飞和优酷国际版,该剧将在全球190多个国家和地区上线。据了解,这是奈飞首次购买古装悬疑剧,并且是继《长安十二时辰》之后的又一部古装悬疑剧走向海外。现在,英文版的《大唐狄公案》预告片已经发布。"TheGreatTangDiGongAnisadaptedfromthenovelofthesamenamebyDutchwriterGaoLuopei.IttellsthelegendarystoryofthefamousTangDynastyofficialDiRen
- 10分钟前 Netflix 奈飞 大唐狄公案 0
-
 正版软件
正版软件
- 50 架波音 737 MAX 将进行修复工作,因供应商错误钻孔位置
- 波音公司在2月5日表示,由于供应商SpiritAeroSystems在一些机身上发现了两个钻错的孔,导致大约50架未交付的737MAX飞机需要进行返工。这一情况可能会导致交付时间推迟。图源Pexels波音公司确认了窗框钻孔间距问题的存在。然而,波音强调这不会对飞行安全产生影响,目前在役的737飞机可以继续安全运营。波音商用飞机公司首席执行官斯坦·迪尔(StanDeal)在致员工的信中表示:“上周四,我们的供应商通知我们部分737机身存在不合格问题。感谢该供应商的员工,他向经理反映了两个孔可能没有按照我们的
- 25分钟前 波音 波音737 0
-
 正版软件
正版软件
- 供应链的自动化实现与机器人及人工智能的关系
- 自动化技术正在广泛应用于不同行业,尤其在供应链领域。如今,它已成为供应链管理软件的重要组成部分。未来,随着自动化技术的进一步发展,整个供应链和供应链管理软件都将发生重大变革。这将带来更高效的物流和库存管理,提高生产和交付的速度和质量,进而促进企业的发展和竞争力。有远见的供应链参与者已经准备好应对新形势。首席信息官应带头确保组织取得最佳结果,了解机器人技术、人工智能和自动化在供应链中的作用至关重要。什么是供应链自动化?供应链自动化是指利用技术手段减少或消除人类在供应链活动中的参与。它涵盖了各种不同的技术和方
- 40分钟前 人工智能 自动化 机器人 0
-
 正版软件
正版软件
- UC伯克利Meta展示音频生成真实人像的AI技术,精确驱动面部和肢体动作!
- 就在最近,Meta和UC伯克利联合提出了一种全新的虚拟人物形象生成的方法——音频生成全身人像,逼真效果,还模拟细节如手势、表情、情绪。图片论文地址:https://arxiv.org/abs/2401.01885话不多说,直接上图。图片可以看到,人像刷地一下就出来了,十分逼真。从上面的文字对话可以看出,讲者的手势动作与讲解内容相符。音频到Avatar,一步!这个系统不光可以生成全身逼真的形象,人像还会根据二人互动的对话动态做出手势。给定语音音频后,音频会为一个人输出多种可能的手势动作,包括面部、身体和双手
- 1小时前 23:00 AI 音频 虚拟人像 0
最新发布
-
 1
1
- 阿里追捧的中台,“热度”退了?
- 1815天前
-
 2
2
- Overture设置踏板标记的方法
- 1652天前
-
 3
3
- 思杰马克丁取得CleanMyMac中国区独家发行授权
- 1642天前
-
 4
4
- IBM:20万台Mac让公司职工在工作中更快乐 更多产
- 1841天前
-
 5
5
- 报道称微软一直在悄然游说反对“维修权”立法!
- 1806天前
-
 6
6
- 美国怀疑华为窃取商业机密 华为:身正不怕影子斜
- 1802天前
-
 7
7
- 三星被曝正与联发科接洽 A系列手机有望搭载其5G芯片
- 1817天前
-
 8
8
- 环球墨非完成千万级融资 联合企业集团投资
- 1839天前
-
 9
9
相关推荐
热门关注
-

- Xshell 6 简体中文
- ¥899.00-¥1149.00
-

- DaVinci Resolve Studio 16 简体中文
- ¥2550.00-¥2550.00
-

- Camtasia 2019 简体中文
- ¥689.00-¥689.00
-

- Luminar 3 简体中文
- ¥288.00-¥288.00
-

- Apowersoft 录屏王 简体中文
- ¥129.00-¥339.00