国防科大提出DiffusionEdge,边缘检测效果优于编码器-解码器架构
 发布于2024-11-30 阅读(0)
发布于2024-11-30 阅读(0)
扫一扫,手机访问
当前的深度边缘检测网络通常采用编码器-解码器架构,其中包含上下采样模块,以更好地提取多层次的特征。然而,这种结构限制了网络输出准确且细致的边缘检测结果。
针对这一问题,一篇 AAAI 2024 上的论文给出了新的解决方案。
- 论文题目:DiffusionEdge: Diffusion Probabilistic Model for Crisp Edge Detection
- 作者:叶云帆(国防科技大学),徐凯(国防科技大学),黄雨行(国防科技大学),易任娇(国防科技大学),蔡志平(国防科技大学)
- 论文链接: https://arxiv.org/abs/2401.02032
- 开源代码: https://github.com/GuHuangAI/DiffusionEdge
国防科技大学iGRAPE Lab提出了一种新的方法,用于二维边缘检测任务。该方法利用扩散概率模型,在学习迭代的去噪过程中生成边缘结果图。为了减少计算资源的消耗,该方法采用隐空间训练网络,并引入了不确定性蒸馏模块以优化性能。同时,该方法还采用解耦架构加速去噪过程,并引入自适应傅立叶滤波器来调整特征。通过这些设计,该方法能够用有限的资源进行稳定训练,并以更少的增强策略预测出清晰准确的边缘图。实验结果表明,该方法在四个公共基准数据集上的准确度和精度方面均显著优于其他方法。
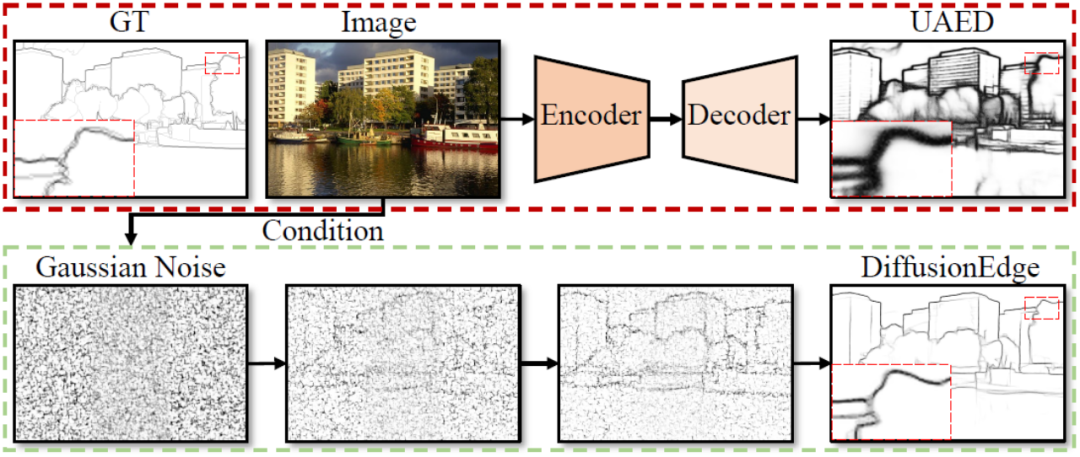
图 1 基于扩散概率模型的边缘检测过程与优势示例
本文的创新点包括:
提出了针对边缘检测任务的扩散模型DiffusionEdge,该模型无需后处理即可预测出更细、更准确的边缘图。
为了解决扩散模型应用时的难点,我们设计了多种技术来确保方法在隐空间中稳定学习。同时,我们还保留了像素级的不确定性先验知识,并自适应地过滤傅立叶空间中的隐特征。
3、在四个边缘检测公共基准数据集上开展的大量对比实验展示了 DiffusionEdge 在准确度和细度方面均具有卓越的性能优势。
相关工作
基于深度学习的方法通常采用包含上下采样的编解码结构集成多层特征 [1-2],或是整合多个标注的不确定性信息以提升边缘检测的准确度 [3]。然而,天然受限于这样的结构,其生成的边缘结果图对于下游任务来说太过粗厚而严重依赖后处理的问题仍然亟待解决。尽管许多工作已经在损失函数 [4-5] 和标签修正策略 [6] 方面做出了探索以使网络能输出更细的边缘,但本文认为该领域仍然需要一个可以不借助任何额外模块,就能直接满足准确度和细度的边缘检测器,而无需任何后处理步骤。
扩散模型是一类基于马尔可夫链的生成模型,通过学习去噪过程逐渐恢复目标数据样本。扩散模型在计算机视觉、自然语言处理和音频生成等领域都表现出了卓越的性能。不仅如此,通过将图像或是其他模态的输入作为额外条件时,其在感知任务中也表现出了巨大的潜力,例如图像分割 [7]、目标检测 [8] 和姿态估计 [9] 等。
方法描述
本文所提出的 DiffusionEdge 方法总体框架如图 2 所示。受以往工作的启发,该方法在隐空间中训练具有解耦结构的扩散模型,并将图像作为额外的条件线索输入。该方法引入了自适应傅里叶滤波器来进行频率解析,且为了保留来自多个标注者的像素级不确定性信息并减少对计算资源的要求,还以蒸馏的方式直接使用交叉熵损失优化隐空间。
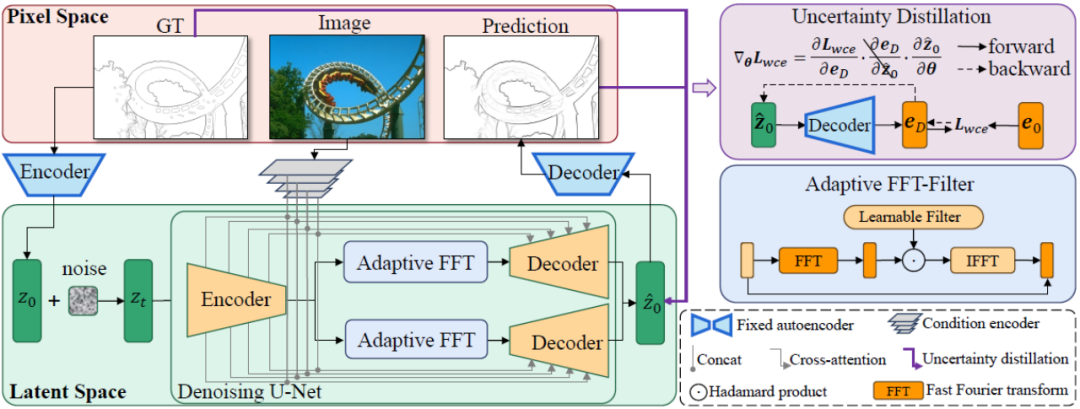
图 2 DiffusionEdge 的整体结构示意
针对目前的扩散模型受到采样步数太多,推理时间太长等问题的困扰,本方法受 DDM [10] 的启发,同样使用解耦的扩散模型架构来加速采样推理过程。其中,解耦的前向扩散过程由显式的转移概率和标准 Wiener 过程的组合来控制:

其中 和
和 分别代表初始边缘和噪声边缘,
分别代表初始边缘和噪声边缘, 指的是反向边缘梯度的显式转换函数。与 DDM 类似,本文方法默认使用常量函数
指的是反向边缘梯度的显式转换函数。与 DDM 类似,本文方法默认使用常量函数 ,则其相应的逆过程可以被表示为:
,则其相应的逆过程可以被表示为:

其中 。为了训练解耦的扩散模型,该方法需要同时监督数据和噪声分量,因此,训练目标可以被参数化为:
。为了训练解耦的扩散模型,该方法需要同时监督数据和噪声分量,因此,训练目标可以被参数化为:

其中 是去噪网络中的参数。由于扩散模型如果要在原始图像空间中训练的话会占用太多的计算成本,因此参考 [11] 的思路,本文提出的方法将训练过程转移到了具有 4 倍下采样空间大小的隐空间中。
是去噪网络中的参数。由于扩散模型如果要在原始图像空间中训练的话会占用太多的计算成本,因此参考 [11] 的思路,本文提出的方法将训练过程转移到了具有 4 倍下采样空间大小的隐空间中。
如图 2 所示,该方法首先训练了一对自编码器和解码器的网络,该编码器将边缘标注压缩为一个隐变量,而解码器则用于从这个隐变量中恢复出原来的边缘标注。如此一来,在训练基于 U-Net 结构的去噪网络阶段,该方法便固定这一对自编码和解码器网络的权重,并在隐空间中训练去噪过程,这样可以大幅减少网络对计算资源的消耗,同时维持不错的性能。
为了提升网络最后的性能,本文提出的方法在解耦操作中引入了一种可以自适应地过滤掉不同频率特征的模块。如图 2 左下角所示,该方法将自适应的快速傅立叶变换滤波器(Adaptive FFT-filter)集成到了去噪 Unet 网络中,位置在解耦操作之前,以在频域中自适应过滤并分离出边缘图和噪声分量。具体来说,给定编码器特征  ,该方法首先沿空间维度执行二维的傅里叶变换(FFT),并将变换后的特征表示为
,该方法首先沿空间维度执行二维的傅里叶变换(FFT),并将变换后的特征表示为  。紧接着,为了训练这个自适应频谱滤波模块,构造了一个可学习的权重图
。紧接着,为了训练这个自适应频谱滤波模块,构造了一个可学习的权重图  并将其W乘以Fc。频谱滤波器可以全局地调整特定频率,并且学习到的权重可以适应不同数据集目标分布的不同频率情况。通过自适应地滤除无用成分,本方法通过快速傅里叶逆变换(IFFT)操作将特征从频域映射回空间域。最后,通过额外引入了来自的残差连接,避免完全过滤掉了所有有用的信息。上述过程可以由以下公式来描述:
并将其W乘以Fc。频谱滤波器可以全局地调整特定频率,并且学习到的权重可以适应不同数据集目标分布的不同频率情况。通过自适应地滤除无用成分,本方法通过快速傅里叶逆变换(IFFT)操作将特征从频域映射回空间域。最后,通过额外引入了来自的残差连接,避免完全过滤掉了所有有用的信息。上述过程可以由以下公式来描述:

其中 是输出特征,o表示哈达玛积(Hadamard Product)。
是输出特征,o表示哈达玛积(Hadamard Product)。
由于边缘和非边缘像素的数量高度不平衡(大多数像素都是非边缘的背景),参考以往的工作,我们同样引入不确定性感知的损失函数进行训练。具体来说,将作为第i个像素的真值边缘概率,对于第j个边缘图中的第i个像素,其值为 ,则不确定性感知 WCE 损失的计算方式如下:
,则不确定性感知 WCE 损失的计算方式如下:
其中 ,其中
,其中 是决定真值标注中不确定的边缘像素的阈值,如果像素值大于 0 而小于此阈值,则此类模糊的,置信度不够高的像素样本将在后续的优化过程中被忽略(损失函数为 0)。
是决定真值标注中不确定的边缘像素的阈值,如果像素值大于 0 而小于此阈值,则此类模糊的,置信度不够高的像素样本将在后续的优化过程中被忽略(损失函数为 0)。 和
和 分别表示真值标注边缘图中边缘和非边缘像素的数量。是用来平衡
分别表示真值标注边缘图中边缘和非边缘像素的数量。是用来平衡 和
和 的权重(设为 1.1)。因此,每个边缘图的最终损失函数计算方式为
的权重(设为 1.1)。因此,每个边缘图的最终损失函数计算方式为 。
。
在优化过程中忽略模糊的低置信度的像素可以避免网络混乱,使训练过程更稳定的收敛,并提高模型的表现。然而,将二元交叉熵损失直接应用于在数值和空间上均未对齐的隐空间中是几乎不可能的。尤其是,不确定性感知的交叉熵损失中利用阈值 (一般从 0 到 1)来判断像素是否为边缘,这是从图像空间上定义的,而隐变量遵循正态分布并且具有完全不同的范围和实际意义。此外,像素级的不确定性很难与不同大小的编码和下采样的隐特征保持一致,二者是很难直接兼容的。因此,将交叉熵损失直接应用于优化隐变量不可避免地会导致不正确的不确定性感知。
(一般从 0 到 1)来判断像素是否为边缘,这是从图像空间上定义的,而隐变量遵循正态分布并且具有完全不同的范围和实际意义。此外,像素级的不确定性很难与不同大小的编码和下采样的隐特征保持一致,二者是很难直接兼容的。因此,将交叉熵损失直接应用于优化隐变量不可避免地会导致不正确的不确定性感知。
另一方面,人们可以选择将隐变量解码回图像级别,从而可以直接使用不确定性感知交叉熵损失来直接监督预测出的边缘结果图。不幸的是,这种实现让反向传播的参数梯度通过了冗余的自编码器网络,使得梯度很难得到有效的传递。此外,自编码器网络中额外的梯度计算会带来巨大的 GPU 内存消耗成本,这违背了本方法设计一个实用的边缘检测器的初衷,很难推广到实际应用中。因此,本方法提出了不确定性蒸馏损失,可以直接优化隐空间上的梯度,具体来说,设重构出的隐变量为 ,自编码器网络的解码器是D,解码出的边缘结果是eD,本方法考虑基于链式法则直接计算不确定性感知的二元交叉熵损失
,自编码器网络的解码器是D,解码出的边缘结果是eD,本方法考虑基于链式法则直接计算不确定性感知的二元交叉熵损失 的梯度,具体计算方式为:
的梯度,具体计算方式为:
为了消除自编码器网络的负面影响,本方法直接跳过了自编码器 传递梯度并将梯度
传递梯度并将梯度 的计算方式修改调整为:
的计算方式修改调整为:
这样的实现方式大大降低了计算成本,并允许利用不确定性感知的损失函数直接在隐变量上优化。如此一来,再结合一个随步数t自适应变化的时变损失权重 ,本方法最终训练优化目标可以被表示为:
,本方法最终训练优化目标可以被表示为:

实验结果
本方法在四个领域内被广泛使用的边缘检测公共标准数据集上进行了实验:BSDS、NYUDv2、Multicue 和 BIPED。由于边缘检测数据标注比较难,标注数据量都比较少,以往的方法通常会使用各种策略来增强数据集。例如说,BSDS 中的图像通过水平翻转 (2×)、缩放 (3×) 和旋转 (16×) 进行增强,能够生成比原始版本扩大了 96 倍的训练集。以往的方法在其他数据集上使用的通用增强策略总结在了表格 1 中,其中 F 代表水平翻转,S 代表缩放,R 代表旋转,C 代表裁剪,G 代表伽马校正。不同的是,本方法仅需要使用随机裁剪的 320320 的图像块来训练所有数据。在 BSDS 数据集中,本方法则仅仅采用随机的翻转和缩放,其定量对比结果展示在了表 2 中。在 NYUDv2、Mu lticue 和 BIPED 数据集中,该方法仅需采用随机翻转训练。在使用更少增强策略的情况下,本方法在各个数据集,各个指标上的表现都优于之前的方法。通过观察图 3-5 的预测结果可以看出,DiffusionEdge 能够学习并预测出跟 gt 分布几乎一样的边缘检测结果图来,预测结果准确而清晰的优势对于有精细化需求的下游任务来说非常重要,也展示了其能直接应用于后续任务的巨大潜力。
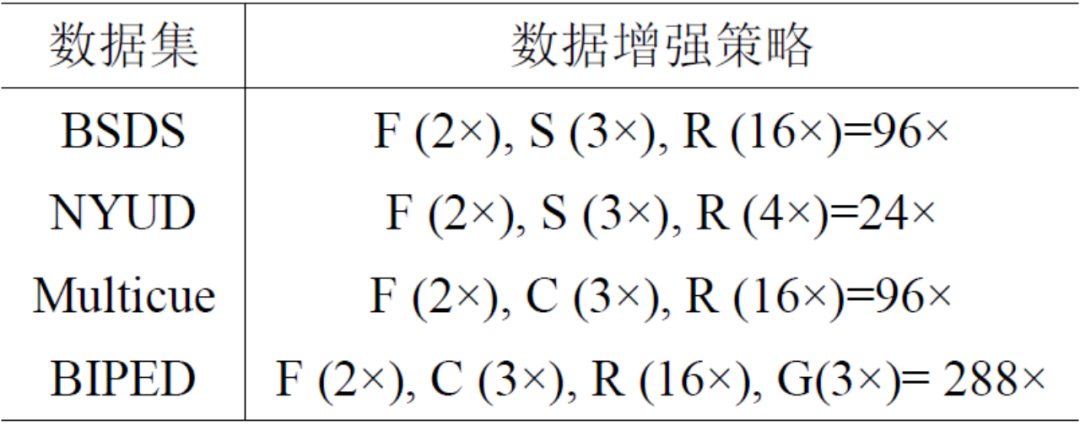
表 1 以往方法在四个边缘检测数据集上使用的增强策略
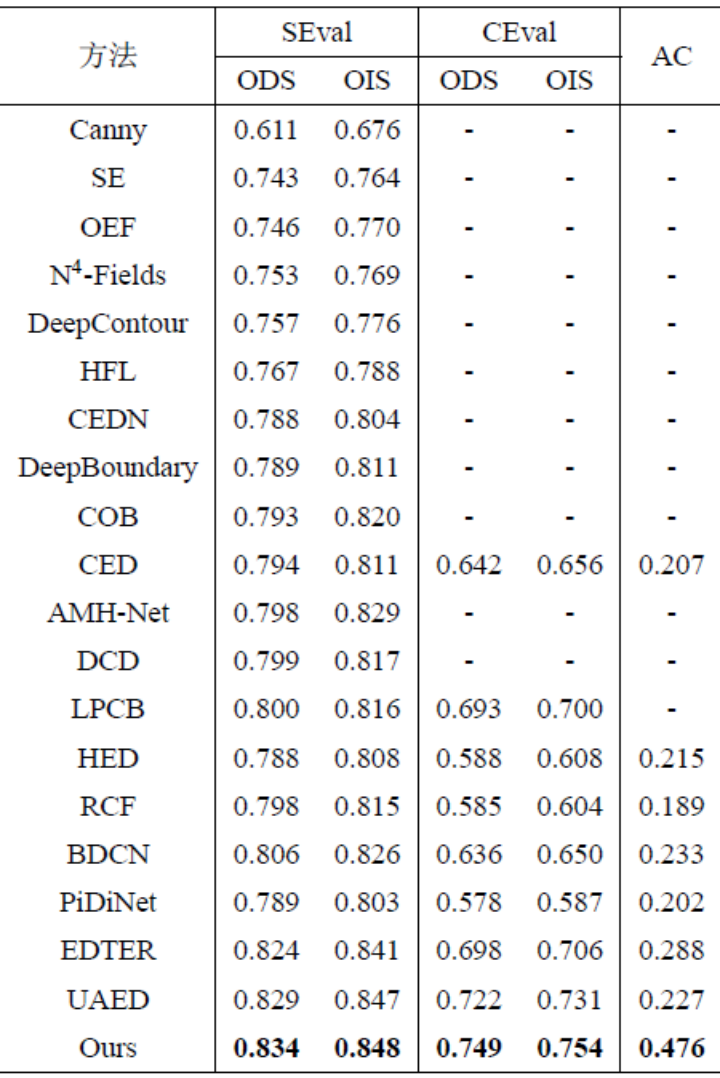
表 2 不同方法在 BSDS 数据集上的定量对比
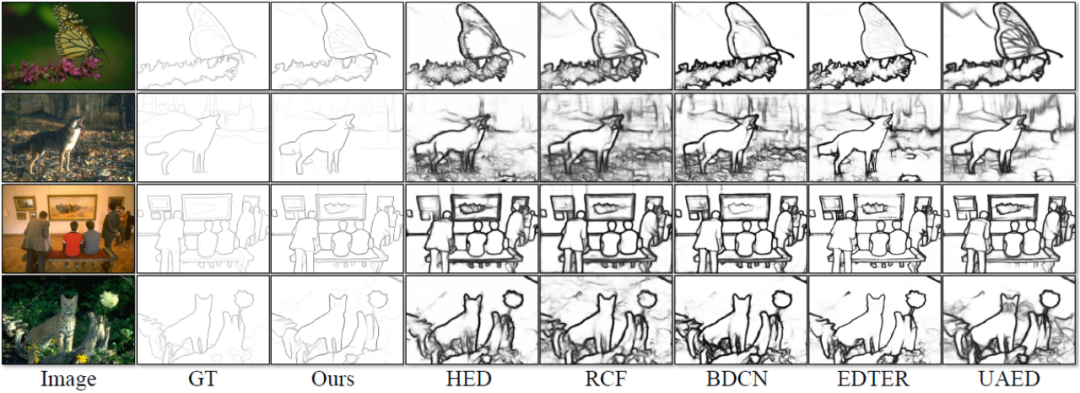
图 3 不同方法在 BSDS 数据集上的定性对比
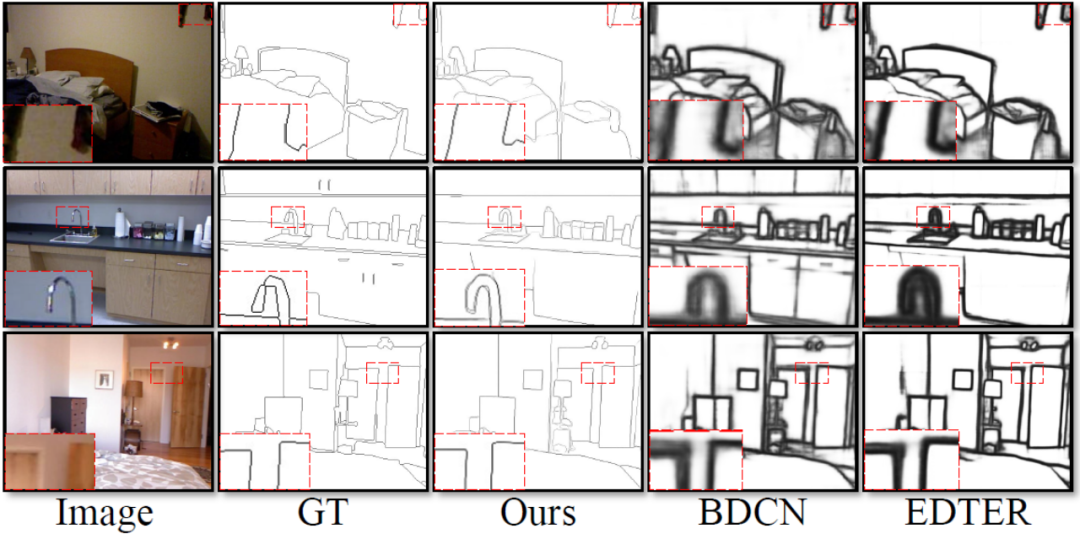
图 4 不同方法在 NYUDv2 数据集上的定性对比
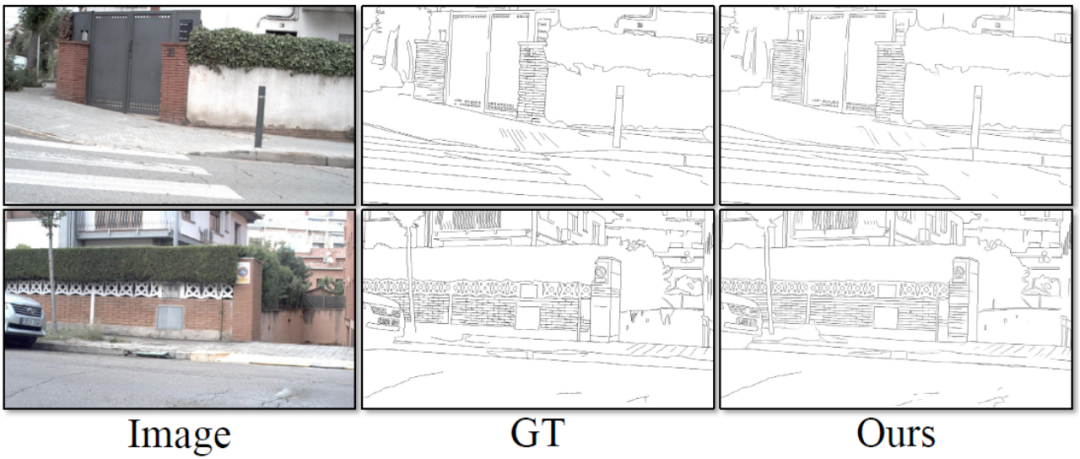
图 5 不同方法在 BIPED 数据集上的定性对比
产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- 奈飞市值增长 700 亿美金,如何实现这一成就?
- 持续数年的流媒体平台之争,即将迎来大结局。作者|连冉编辑|郑玄传统娱乐巨头与奈飞的流媒体战争中,他们正在逐渐失去优势。而AI技术导致的好莱坞编剧罢工,则成为2023年的致命打击。近日,据《金融时报》等媒体报道,因为花费了大量资金内容在内容制作上,迪士尼、华纳兄弟探索频道、康卡斯特和派拉蒙等传统娱乐巨头的流媒体服务在2023年的损失达50亿美元以上。投资者们对这些巨头的流媒体业务的态度发生了180度转弯,从之前的看好已经转为期待后者尽快缩减规模或者将其剥离。奈飞推出流媒体视频服务时,与传统美国影视巨头之间曾
- 8分钟前 流媒体 网飞 0
-
 正版软件
正版软件
- 高合汽车就薪资延迟支付和高管自愿减薪事件回应:情况属实
- 本站2月8日消息,日前,有网友称高合汽车在2月7日召开了员工大会并作出通知:1月的工资无法按时发放、2023年年终奖取消、建议员工自寻出路等。据新浪财经报道,针对此事,高合汽车在接受媒体采访时表示:针对公司公告里的信息确有其事。根据生产经营的实际情况,公司正在采取比如高管主动降薪、缓发工资等调整措施面对内外部的挑战。但是,网传全员居家办公是不实信息,春节前有些同事休假提前回家。在去年10月,部分职场类App就有高合员工声称公司开始进行20%比例的裁员,有的部门裁了50%。对于“比例高达20%的大规模裁员”
- 23分钟前 高合汽车 0
-
 正版软件
正版软件
- 丹麦隐私审查机构限制与谷歌分享学生数据,或许需要禁用Chromebook
- 据BleepingComputer报道,丹麦隐私监管机构Datatilsynet最近做出裁决,要求丹麦各城市在使用可能泄露儿童数据的谷歌服务之前,必须获得更加充分的隐私保障。监管机构发现,谷歌将来自Chromebook和GoogleWorkspaceforEducation的学生数据用于其自身目的,违反了欧洲隐私法。这一裁决意味着,丹麦城市必须确保使用谷歌服务不会给儿童数据的隐私带来风险,并采取适当的措施来保护这些数据的安全。这也是欧洲各国在保护儿童隐私方面越来越重视的一个例子。根据本站的了解,据Data
- 38分钟前 谷歌 0
-
 正版软件
正版软件
- 特斯拉或有裁员计划,要求经理确定重要团队成员
- 据彭博社报道,特斯拉近日似乎计划进行新一轮裁员,要求经理们确定其团队中的“关键”成员。据知情人士透露,最近几天,特斯拉的美国经理受到要求对其下属进行“二元评估”,以确定员工在岗位上的重要性。消息人士称,特斯拉之前取消了部分员工的半年绩效评估。特斯拉最近的裁员举动引发了外界对其未来的担忧。虽然特斯拉裁员并不罕见,但这次裁员可能意味着公司正面临一些挑战。过去,特斯拉一直以迅猛的人员扩张而闻名,但近年来,招聘速度已经放缓。2022年,特斯拉新增员工2.9万人,而2023年仅新增1.2万人。这一数字反映了公司在扩
- 1小时前 23:00 特斯拉 裁员 0
-
 正版软件
正版软件
- 德国法院禁止英特尔在该国销售部分处理器,裁定其侵犯了R2半导体专利
- 德国杜塞尔多夫地区法院裁定英特尔侵犯了R2半导体的专利,并颁布了禁令,禁止在德国销售部分英特尔前代处理器。报道指出,戴尔和惠普设备也可能受到此禁令的影响。图源Pexels德国法院禁止销售某些英特尔处理器及相关设备,英特尔则主张其产品不侵犯R2半导体的专利,并要求法院宣告该专利无效。本站注意到,涉案的欧洲专利涉及电压调节技术。根据R2半导体的声称,英特尔的酷睿系列处理器,包括IceLake、TigerLake、AlderLake和Xeon可扩展"IceLake服务器"处理器,以及搭载这些处理器的消费类笔记本
- 2小时前 22:45 半导体 英特尔 专利 0













