一个关于BEV车道线落地的点点滴滴
 发布于2024-12-11 阅读(0)
发布于2024-12-11 阅读(0)
扫一扫,手机访问
21年 埋下了一颗种子
看过BEV障碍物故事的同学应该清楚,我们组是在21年10月左右开始做BEV 障碍物的。那个时候不敢想着去做BEV 车道线,因为没有人力。但是我记得在12月左右的时候,我们面到了一个候选人,在面试的过程中听到他们做了差不多半年多的BEV 车道线,整个技术路线是通过高精地图来作为BEV 车道线网络的训练真值,并说效果还不错。很遗憾,那个候选人最后没有来我们这里。结合21年Telsa AI day 讲的车道线内容,一个要做BEV 车道线的种子就这样在组内埋下了。
22年 走对了第一步
整个22年,我们组内人力都是很紧张的,我记得在6,7月份的时候,我们刚好有人力去探索一下BEV 车道线。但是当时我们组只有一个同学(我们就先叫他小轩同学吧)有2个月的时间去做这件事。然后21年的那颗种子开始发芽了,我们准备先从数据下手,小轩同学还是很给力的(很有想象力,后续小轩同学也做了更多令大家惊喜的东西),差不多用了2月的时间,我们可以通过高速高精地图来提取对应的车周围的车道线数据。当时做出来的时候,我记得大家还是很激动的。
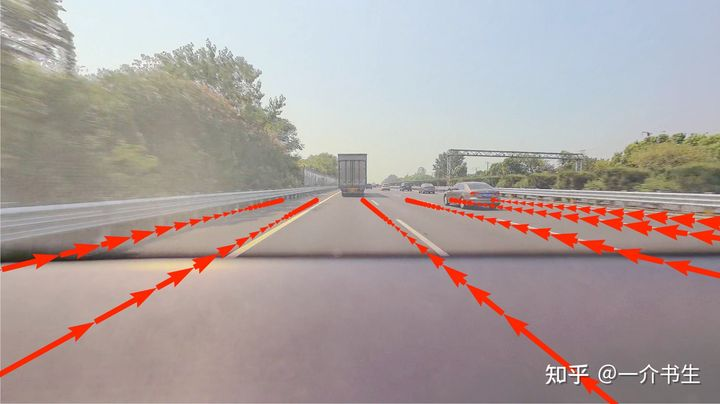
图1: 高精地图车道线 投影到图像系的效果
大家从图1上可以看出,贴合对还是有一些问题,因此小轩同学又做了系列的优化。2个月后,小轩同学去做其他任务了,现在回头看,我们的BEV 车道线探索之路,已经走对了第一步。因为在21年,22年已经逐步有很多优秀的BEV 车道线论文和代码相继开源。看到这里,你可能以为23年一定有一个完完美美的BEV 车道线落地的故事,然后理想往往都很丰满,现实却是很残酷。
23年 跌跌撞撞
由于我们BEV 障碍物已经证明BEV 这条路是可以走下去了,并且在路测也表现出了不错的效果。组内开始有了更多的资源来考虑车道线这件事,注意这里不是BEV了。为什么呢?因为在这个时候,我们面临了很大的上线压力,BEV 车道线又没有足够的经验,或者说整个组内做过2D 车道线量产的人都几乎没有。23年前半年,真的可以用跌跌撞撞来形容,我们内部激烈的讨论了很多次,最后决定形成2条线,一条线为2D 车道线: 大部分的人力在2D 车道线这条线上,重后处理,轻模型,通过2D 车道线这条线来积累车道线后处理量产经验。一条线为BEV 车道线:只有一小部分人力(其实就1-2个人力),注重BEV 车道线的模型设计, 积累模型经验。BEV 车道线的网络已经有很多了,我在这里贴2篇对我们影响比较大的论文供大家参考。《HDMapNet: An Online HD Map Construction and Evaluation Framework》 和 《MapTR: Structured Modeling and Learning for Online Vectorized HD Map Construction》
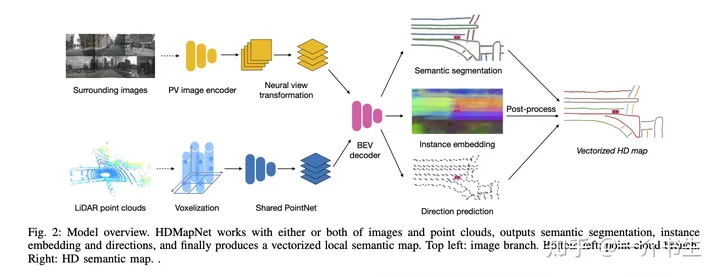
图2: HDMapNet
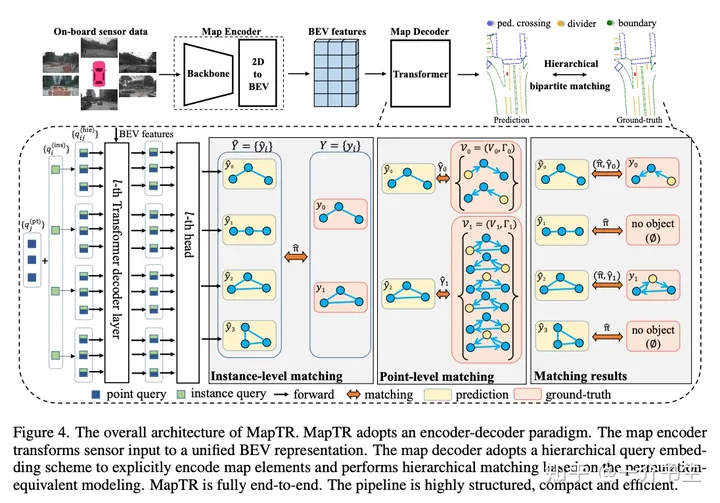
图3 MapTR
很幸运,在4,5月份的时候,我们在2D 车道线这条线积累了大量的车道线后处理量产经验,我们的BEV 车道线网络也设计出来了,在5月底,很快BEV 车道线顺利上车。在这里不得不说一下我们负责车道线后处理的大海同学,还是很给力的。然而当你觉得很顺利的时候,往往噩梦就要开始了。BEV 车道线部署后,控车效果不理想,这个时候大家陷入了自我怀疑阶段,到底是因为BEV 车道线3次样条曲线拟合的问题,还是下游参数没有适配好的问题。万幸的是,我们车上有供应商的效果,我们在路测时把供应商的车道线结果保存下来,然后在可视化工具里面在和我们的结果对比。当控车效果不好的时候,先证明我们自己的车道线质量是没有问题,这样驱动下游来适配我们的BEV车道线。一个月,整整一个月的时间,我们才稳定控车。我记得很清楚,我们还从上海跑到苏州,那天还是周六,大家在群里看到高速的控车效果都很激动。
然而一个故事往往都是一波三折的,我们只能利用高速高精地图来生产车道线数据。城市怎么办,还有那么多badcase 需要解决。这个时候重要人物终于要出现了,我们就先叫他小糖同学吧(我们数据组的大管家)。小糖同学他们利用点云重建来给我们重建出来重建clip(这个过程还是蛮痛苦,我记得那两个月是他们压力最大的时候,哈哈,当然我们和小糖同学经常相爱相杀,毕竟经常在开会时常常说又没有数据了。)。然后重建出来后怎么标注,放眼当时手里的供应商们,都没有这样的标注工具,别说什么标注经验了。又是和小糖同学他们一起,经历了漫长的1个月时间,标注工具终于和供应商打磨好了。(我们经常开玩笑说,我们这是在赋能整个自动驾驶的标注行业,这个过程是真痛苦,重建clip 加载是真慢 )。然而整个标注还是比较慢的,或者比较贵,这个时候小轩同学带着他的车道线预标注大模型闪亮登场(车道线预标注的大模型效果还是杠杠的),大家看他的眼神都在闪闪发光。这一套组合拳打下来,我们的车道线数据生产终于是磨合的差不多了。8月份的时候我们的BEV 车道线控车道线已经迭代的不错了,对于简单的高速领航功能。现在小轩同学在大模型预标注方向依旧不断的给我们带来更多的惊喜,我们和小糖同学依旧在相爱相杀中。
然而一个故事都不是这么容易结束,我们在9月份的时候,开始动手做多模态(Lidar,camera,Radar)多任务(车道线,障碍物,Occ)前融合模型,并后续支持城市领航功(NCP), 也就是所谓的重感知,轻地图的方案。基于BEV障碍物和BEV 车道线的经验前融合网络我们很快就部署上车了,应该是在9月底的时候。车道线也加了很多子任务,路面标识别,路口的拓扑等等。在这个过程中,我们对BEV 车道线的后处理进行了升级,抛弃了车道线3次样条曲线拟合,而采用点的跟踪方案,点的跟踪方案和我们的车道线模型的输出可以很好的结合在一起。这个过程也是一个痛苦的,我们连续2个月,每周开一次专项会,毕竟我们已经基于拟合的方案做的不错了,但是为了更高的上限,只能痛并快乐着。最终目前我们已经把基础的功能进行路测了。
稍微给大家解释一下图4,左边是车道线点跟踪的效果目前我们模型的感知范围只有前80米,大家可以看到车后也有一些点,这是跟踪留下的。右边是我们的建立的实时感知图,当然现在还在一个快速迭代的过程,还有很多问题正在解决中。
24年 新的开始
时刻,站在24年回看我们从21年到现在的一路成长和积累,很庆幸在21年那个点,有机会去做BEV, 也很庆幸有一群志同相合的小伙伴一路相辅相成。24年,对我们来说,有很多东西需要去追寻,前融合模型的量产上线,数据方向的发力,时序模型的探索,端到端的畅想等等。
产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- 数字货币钱包地址怎么获得
- 数字货币钱包地址是用于交易的唯一标识符。获取方式如下:1.安装数字货币钱包并创建新地址;2.给地址添加标签;3.分享地址供他人向你发送数字资产。
- 8分钟前 0
-
 正版软件
正版软件
- 回顾ETH Denver 2024七个演讲:MEV、ERC-4377 、区块空间商业模式、公共物品资金、社区
- ETHDenver2024已经圆满结束,在整个活动期间,演讲者们带来了各种各样的议题,从技术创新到社区发展,无一不在探讨着Web3未来前景。现在让我们回顾一下其中的一些精彩演讲,深入洞察行业的最新动态。TL;DR:EigenPhi数据分析师-MEV不断变化的格局:隐私订单和交易可观察性对MEV有影响。搜索者和建设者的合作关系可能导致某些搜索者垄断MEV收入,损害生态系统公平性。以太坊基金会成员-理解ERC4377:ERC4377协议旨在提高智能合约账户易用性和去中心化特性。智能合约交易验证阶段受到限制,防
- 18分钟前 eth 回顾 0
-
 正版软件
正版软件
- Binance Labs宣布投资比特币再质押项目BounceBit!何一:CeFi和DeFi融合
- 本站(120bTC.coM):BinanceLabs宣布对BounceBit进行投资,它是比特币再质押及CeDeFi协议,旨在将比特币从被动资产,转变为加密货币生态系统中的动态参与者。BounceBit是想利用比特币的潜力,将其整合进各种产生收益的活动中,而不改变其底层区块链。这一协议的核心理念是利用以资产为主导的策略,来赋予比特币主导地位,这些策略包括资金费率套利,和发行链上凭证,以进行再质押和挖矿。Binance的共同创办人及BinanceLabs负责人何一表示:「BounceBit通过CeFi和De
- 33分钟前 莱特币投资 如何投资比特币 区块链投资骗局 0
-
 正版软件
正版软件
- 吉利银河神秘新车亮相,科技惊艳全场!
- 4月18日消息,吉利银河今日宣布正式发布,其科技旗舰SUV新品将会在即将到来的4月25日北京国际车展上惊艳登场。根据官方发布的预热图中可以看出,这款新型SUV设计独特,未设置传统的车门把手,而是可能采用创新的前后对开门设计,同时还装备了流媒体后视镜,展现了吉利银河在科技和设计上的前瞻性。去年的银河L7发布会上,吉利已经向公众展示了银河品牌的未来产品线,其中就包括了预计2025年推出的银河L9电混SUV。此外,吉利银河E5紧凑级纯电SUV也已经通过了工信部的申报,预计将在今年第二季度正式上市,这无疑将进一步
- 48分钟前 吉利银河 0
-
 正版软件
正版软件
- 火币里购买狗狗币
- 在火币上购买狗狗币的步骤:创建火币账户并完成KYC验证。充值资金,支持法币付款方式(因国家/地区而异)。搜索“DOGE”交易对,选择“买入”选项卡并输入购买金额。检查交易详细信息,然后点击“买入”以完成交易。
- 1小时前 21:40 0













