Cam4DOcc:摄像头预测时空占据网络,助自动驾驶延展视野
 发布于2024-12-13 阅读(0)
发布于2024-12-13 阅读(0)
扫一扫,手机访问
2024年2月27日,由毫末智行人工智能技术团队提交的论文《Cam4DOcc: Benchmark for Camera-Only 4D Occupancy Forecasting in Autonomous Driving Applications》成功入选国际顶会 CVPR 2024。
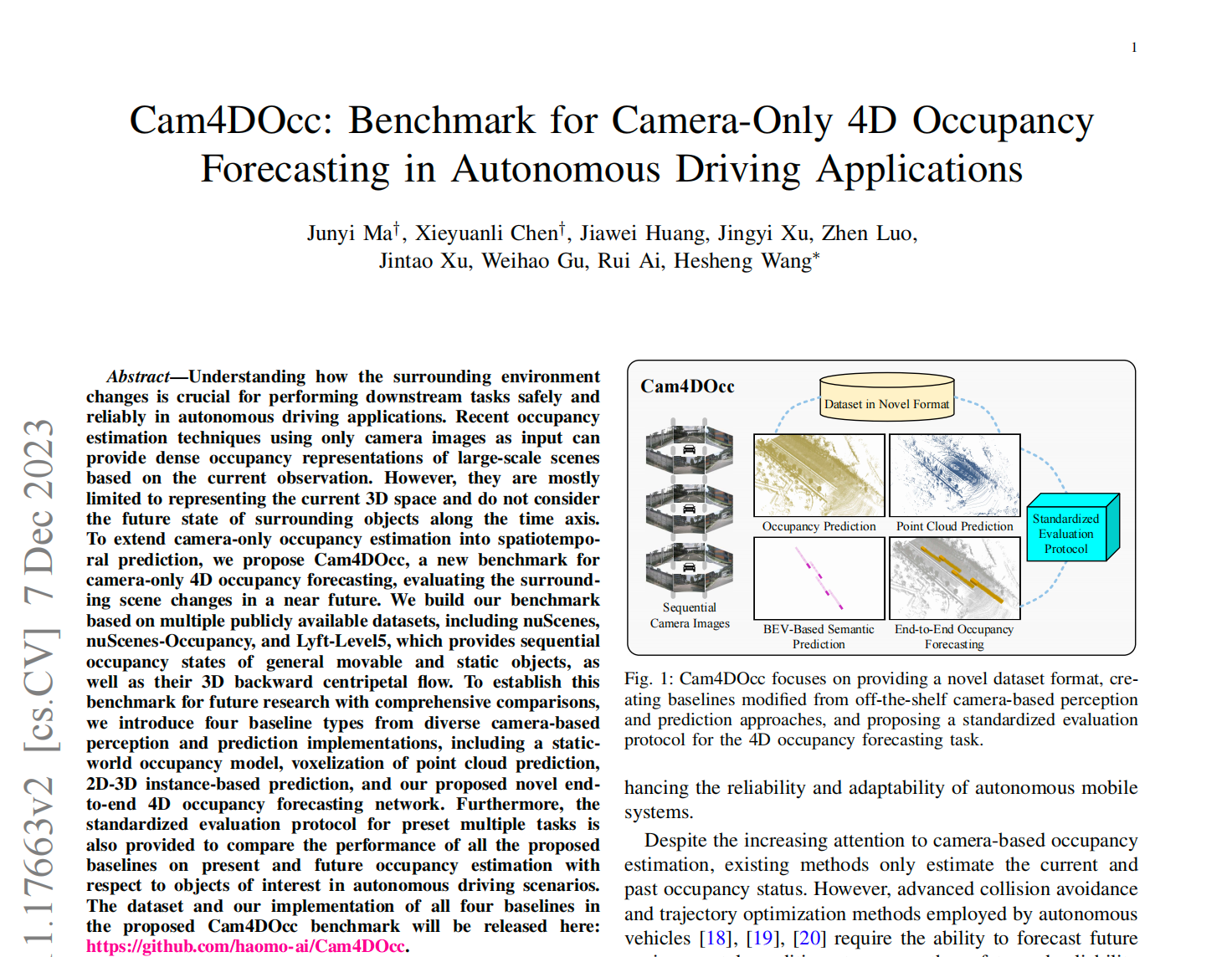
Cam4DOcc是毫末提出的一种新的基准,它利用摄像头进行4D占据网格预测。这种方法可以评估近期内周围场景的变化,将摄像头的占据网格估计扩展到时空预测。这样一来,自动驾驶系统在感知和预测周围环境动态变化方面的能力得到了提升。
首先,毫末基于几个公开可用的数据集创建了新格式的数据集,并进一步提出了标准化的评估协议以及四种基线类型,为 Cam4DOcc 基准提供基本参考。其次,毫末提出了第一个基于摄像头的 4D 占据预测网络 OCFNet,以端到端的方式估计未来的占据状态。最后,毫末基于 Cam4DOcc 基准,进行了多个实验,涉及四种不同的任务,以全面评估所提出的基线以及 OCFNet。实验结果表明,OCFNet 优于所有基线,并且即使在看到有限的训练数据时仍能产生合理的未来占据。通过比较四种不同类型的基线,毫末证明了端到端时空网络可能是仅利用摄像头进行占据预测的最有前途的研究方向。此外,使用膨胀的 GMO 标注和额外的 3D 反向径向流也被验证是对于 4D 占据预测有益的。

计算机视觉与模式识别会议(IEEE Conference on Computer Vision and Pattern Recognition,简称:CVPR)是计算机视觉与模式识别领域的三大顶级会议之一,由纽卡斯尔大学、悉尼科技大学、约翰霍普金斯大学等顶级名校和机构组织。CVPR 有着非常严苛的录用标准,毫末提出Cam4DOcc方法的论文成功入选 CVPR2024,代表了对毫末技术探索成果的认可。
从成立以来,毫末始终立足技术创新,不断取得众多引领行业的技术专利成果,并在国内率先布局大模型、大算力、大数据的自动驾驶技术发展方向。毫末发布的行业首个自动驾驶生成式大模型 DriveGPT 雪湖·海若,在自动驾驶系统开发过程中带来了巨大的技术提升,使得毫末自动驾驶系统开发彻底进入了全新模式,也极大加速汽车智能化的发展进程。
产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- 建议制定国家通用人工智能发展规划:刘庆峰在《焦点访谈》中分享看法
- 本站3月7日消息,在今年两会期间,人工智能成为热议话题。据央视《焦点访谈》报道,全国人大代表、科大讯飞董事长刘庆峰建议,我国应顶格制定国家通用人工智能发展规划,以推动该领域的深入发展。刘庆峰在这次两会上提出了一个关于中国制定国家通用人工智能发展规划的建议。他强调了利用国家的体制优势,将国家战略力量和社会科技资源整合起来的重要性。在未来的五年里,他呼吁持续支持人工智能领域的算法、数据和算力,并强调了对标最新成果的重要性。在报道中,刘庆峰向记者展示了科大讯飞最新版本的国产自主技术——人工智能大模型。这一模型背
- 6分钟前 人工智能 刘庆峰 焦点访谈 0
-
 正版软件
正版软件
- YY 直播计划引入短剧版权,并推动自制内容 吸引更多主播
- YY直播负责人李乐在闭门活动中透露,他们正在试水引入部分短剧版权内容,并计划未来自制短剧。此举旨在吸引更多合作公会和主播参与拍摄,以丰富平台内容,提升用户体验。YY直播(原名“YY语音”)是由欢聚时代于2008年推出的网络团队语音通信软件。主要功能包括进行在线多人语音聊天和参与在线真人秀视频互动。根据公开资料,该应用通过提供多样化的直播内容和互动形式,吸引了大量用户参与和互动。后来,“YY语音”改名“YY直播”,再后来又拆分为“YY直播”与“虎牙直播”。2020年11月,百度宣布收购“YY直播”,但百度2
- 11分钟前 yy直播 0
-
 正版软件
正版软件
- 华为 FreeClip 耳夹耳机 & 华为 Pocket 2:女神节必备时尚配件
- 恰逢女神节,不少男士都想挑选一份特别的礼物来表达对身边“女神”的关爱与祝福。但是,面对礼品选择,许多人可能会感到困惑。送花、送口红香水虽然充满仪式感,但常见的礼物可能会让人感到缺乏新意和实用性,难免有些“审美疲劳”。而直接发红包,又可能显得过于俗气,缺乏新意。如果你此时此刻也为“送礼”而烦恼,那么不妨来看看小编为大家推荐的华为女神节送礼CP好物——华为FreeClip耳夹耳机与华为Pocket2,这对完美的时尚搭档及影音伴侣,一定会成为你今年女神节送礼的最优选,轻松俘获她的芳心。我们知道多数女生是“颜值控
- 26分钟前 0
-
 正版软件
正版软件
- 三星 3纳米工艺的良率仍未达到60%
- 本站3月7日消息,据韩媒DealSite近日报道,三星电子的3nm工艺良率方面仍然堪忧。本站注意到,DealSite此报道中仅笼统提到是3nm,未具体提到是哪一种工艺。消息人士表示,三星的3nm良率目前仍在50%级别徘徊,并未站上6成。虽然有个别分析师认为已达七成以上,但目前GAA工艺仍不够稳定,无法确保良率。▲三星3nm制程投产新闻稿照片。图源三星官网关于三星3nm工艺良率众说纷纭,三星宣布量产后的部分消息整理如下:2023年5月,三星宣称其3nm良率可达60~70%;2023年7月,机构HiInves
- 36分钟前 半导体 芯片 三星 0
-
 正版软件
正版软件
- 低比特量化的大型语言模型权重和激活功能已实现商用APP集成 - ICLR 2024 Spotlight
- 模型量化是模型压缩与加速中的一项关键技术,其将模型权重与激活值量化至低bit,以允许模型占用更少的内存开销并加快推理速度。对于具有海量参数的大语言模型而言,模型量化显得更加重要。例如,GPT-3模型的175B参数当使用FP16格式加载时,需消耗350GB的内存,需要至少5张80GB的A100GPU。但若是可以将GPT-3模型的权重压缩至3bit,则可以实现单张A100-80GB完成所有模型权重的加载。目前,现有的大型语言模型后训练量化算法存在一个明显的挑战,即依赖手动设定量化参数,缺乏相应的优化过程。这导
- 51分钟前 工程 模型量化 0
最新发布
-
 1
1
- 阿里追捧的中台,“热度”退了?
- 1829天前
-
 2
2
- Overture设置踏板标记的方法
- 1666天前
-
 3
3
- 思杰马克丁取得CleanMyMac中国区独家发行授权
- 1656天前
-
 4
4
- IBM:20万台Mac让公司职工在工作中更快乐 更多产
- 1854天前
-
 5
5
- 报道称微软一直在悄然游说反对“维修权”立法!
- 1820天前
-
 6
6
- 美国怀疑华为窃取商业机密 华为:身正不怕影子斜
- 1816天前
-
 7
7
- 三星被曝正与联发科接洽 A系列手机有望搭载其5G芯片
- 1831天前
-
 8
8
- 环球墨非完成千万级融资 联合企业集团投资
- 1852天前
-
 9
9
相关推荐
- 建议制定国家通用人工智能发展规划:刘庆峰在《焦点访谈》中分享看法
- YY 直播计划引入短剧版权,并推动自制内容 吸引更多主播
- 华为 FreeClip 耳夹耳机 & 华为 Pocket 2:女神节必备时尚配件
- 三星 3纳米工艺的良率仍未达到60%
- 低比特量化的大型语言模型权重和激活功能已实现商用APP集成 - ICLR 2024 Spotlight
- 几何E萤火虫301KM龙腾版5.98万元引领纯电SUV市场
- 广汽埃安AION V Plus全系车型优惠2.3万元,最高配车型优惠明显
- 丰田加快电动汽车电池布局,大举提升Primearth EV Energy股份
- 全新腾势D9正式发布,8款车型可供选择,起售价为33.98万元
热门关注
-

- Xshell 6 简体中文
- ¥899.00-¥1149.00
-

- DaVinci Resolve Studio 16 简体中文
- ¥2550.00-¥2550.00
-

- Camtasia 2019 简体中文
- ¥689.00-¥689.00
-

- Luminar 3 简体中文
- ¥288.00-¥288.00
-

- Apowersoft 录屏王 简体中文
- ¥129.00-¥339.00