利用Vision Pro在实时模式下训练机器狗!MIT博士生的开源项目备受关注
 发布于2024-12-15 阅读(0)
发布于2024-12-15 阅读(0)
扫一扫,手机访问
Vision Pro又现火爆新玩法,这回还和具身智能联动了~
就像这样,MIT小哥利用Vision Pro的手部追踪功能,成功实现了对机器狗的实时控制。
不仅开门这样的动作能精准get:
也几乎没什么延时。
Demo一出,不仅网友们大赞鹅妹子嘤,各路具身智能研究人员也嗨了。
比如这位准清华叉院博士生:
还有人大胆预测:这就是我们与下一代机器互动的方式。

项目如何实现,作者小哥朴英孝(Younghyo Park)已经在GitHub上开源。相关App可以直接在Vision Pro的App Store上下载。
用Vision Pro训练机器狗
具体来看看作者小哥开发的App——Tracking Steamer。
顾名思义,这个应用程序旨在利用Vision Pro追踪人类动作,并将这些动作数据实时传输到同一WiFi下的其他机器人设备上。
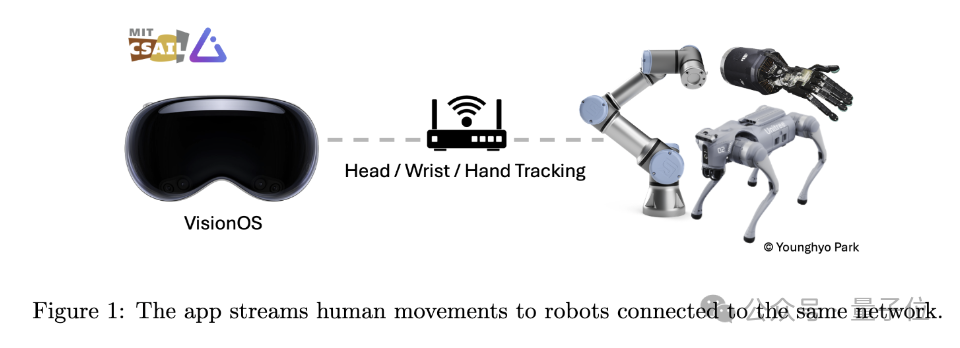
动作追踪的部分,主要依靠苹果的ARKit库来实现。
其中头部追踪调用的是queryDeviceAnchor。用户可以通过长按数字表冠来重置头部框架到当前位置。
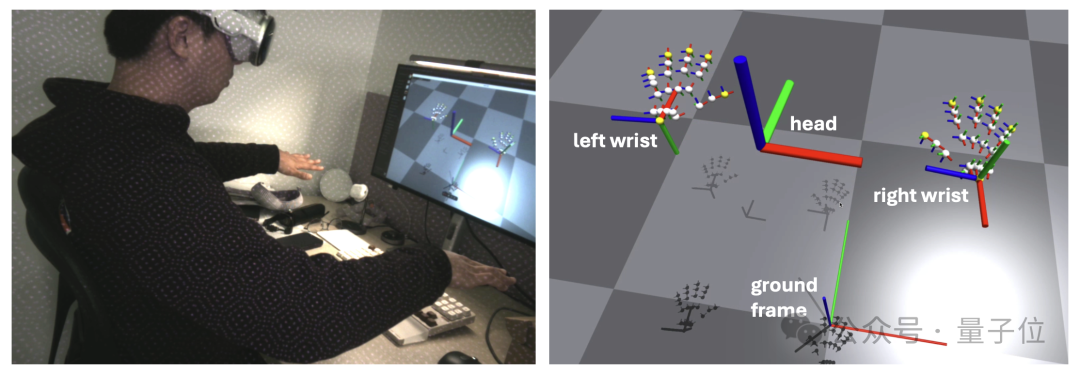
手腕和手指追踪则通过HandTrackingProvider实现。它能够追踪左右手腕相对于地面框架的位置和方向,以及每只手25个手指关节相对于手腕框架的姿态。
网络通信方面,这个App使用gRPC作为网络通信协议来流式传输数据。这使得数据能被更多设备订阅,包括Linux、Mac和Windows设备。
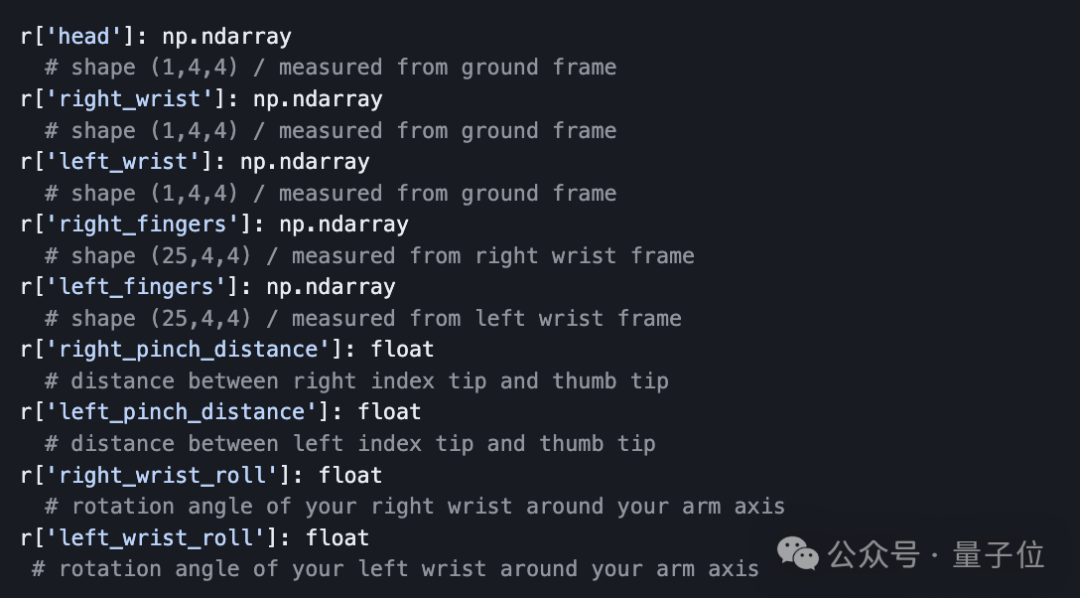
另外,为了方便数据传输,作者小哥还准备了一个Python API,让开发者能够通过编程方式订阅和接收从Vision Pro流式传输的追踪数据。
API返回的数据是字典形式,包含头部、手腕、手指的SE(3)姿态信息,即三维位置和方向。开发者可以直接在Python中处理这些数据,用于对机器人的进一步分析和控制。
就像不少专业人士所指出的那样,别看机器狗的动作还是由人类控制,事实上,相比于“操控”本身,结合模仿学习算法,人类在这个过程中,更像是机器人的教练。
而Vision Pro通过追踪用户的动作,提供了一种直观、简单的交互方式,使得非专业人员也能够为机器人提供精准的训练数据。
作者本人也在论文中写道:
在不久的将来,人们可能会像日常戴眼镜一样佩戴Vision Pro这样的设备,想象一下我们可以从这个过程中收集多少数据!
这是一个充满前景的数据源,机器人可以从中学习到,人类是如何与现实世界交互的。
最后,提醒一下,如果你想上手试一试这个开源项目,那么除了必备一台Vision Pro之外,还需要准备:
- 苹果开发者账户
- Vision Pro开发者配件(Developer Strap,售价299美元)
- 安装了Xcode的Mac电脑
嗯,看样子还是得先让苹果赚一笔了(doge)。
项目链接:https://github.com/Improbable-AI/VisionProTeleop?tab=readme-ov-file
产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- 即将开启!2024年中国具身智能大会将于3月29-31日在上海举行,与您共同探讨!
- 由中国人工智能学会主办,CAAI具身智能专委会(筹)、同济大学、中国科学院计算技术研究所、上海交通大学联合承办的中国具身智能大会(CEAI2024)将于2024年3月29-31日在上海市徐汇区西岸智塔召开。本次大会将为具身智能领域的学术界和产业界提供前沿的技术发展动态、丰富多样的学术交流活动、全面前瞻的产业技术宣传平台,以广泛促进学术分享与交流、产业合作与互动,推动产学研联动发展,提升我国具身智能技术的研究与应用水平。此次CEAI2024特别邀请CAAI理事长、中国工程院戴琼海院士,CAAI名誉理事长、中
- 3分钟前 产业 0
-
 正版软件
正版软件
- 2024CEAI专题论坛:知识与数据的双重推动力 | 中国智能大会
- 点击完成注册缴费》》点击了解展览详情》》
- 8分钟前 产业 0
-
 正版软件
正版软件
- 机器人综合移动和操作技术讨论会 | CEAI 2024专题论坛 | 中国智能机器人大会
- 点击完成注册缴费》》点击了解展览详情》》
- 23分钟前 产业 0
-
 正版软件
正版软件
- 微软新专利曝光:折叠屏手机或将带来突破
- 尽管微软的SurfaceDuo系列双屏手机逐渐淡出公众视野,但最近公司公布了一项名为“US-20240069605”的新专利,再次引发了对其移动设备战略的关注。这项专利描述了一种“折叠屏脊椎盖板装置”,其申请公布日为2024年2月29日。根据专利摘要,这项设计包含一种名为“脊椎盖板”的组件,其作用是保护设备内部的铰链。在手机折叠时,脊椎盖板会移动至设备的内部铰链机制,有助于减少设备整体厚度,提升握持感。据了解,之前有消息称微软取消了SurfaceDuo3的开发,转而专注于折叠屏和直板手机的研发。特别是随着
- 43分钟前 微软 0
-
 正版软件
正版软件
- 曝光坦克330官方图片,预计将搭载3.0升V6发动机即将登场
- 坦克SUV官方最近宣布了一项重要决定,他们计划将坦克500的引擎技术植入到坦克300车型中,推出一款全新的车型——坦克330。这款新车的官方图片已经发布,预计将在本月16日正式发布并面向消费者销售。据悉,坦克330的售价可能会超过35万元,这将是一款价格不菲但性能卓越的SUV车型。从曝光的官图来看,坦克330在外观设计上继承了坦克300边境版的一些元素,如相似的前保险杠设计。然而,为了满足更大排量发动机的需求,新车的发动机舱盖经过了重新设计,更加隆起,使得整体视觉效果更加霸气。据了解,坦克330的尺寸相当
- 48分钟前 坦克 0













