主流标定工具:相机和激光雷达的标定方法及工具汇总
 发布于2024-12-20 阅读(0)
发布于2024-12-20 阅读(0)
扫一扫,手机访问
相机和激光雷达的标定是许多任务中至关重要的基础工作,标定的准确度直接影响了后续方案融合的效果上限。随着许多自动驾驶和机器人公司投入了大量的人力和物力来不断提高标定的准确性,今天我们将为大家介绍一些常见的Camera-Lidar标定工具箱,建议大家收藏起来!
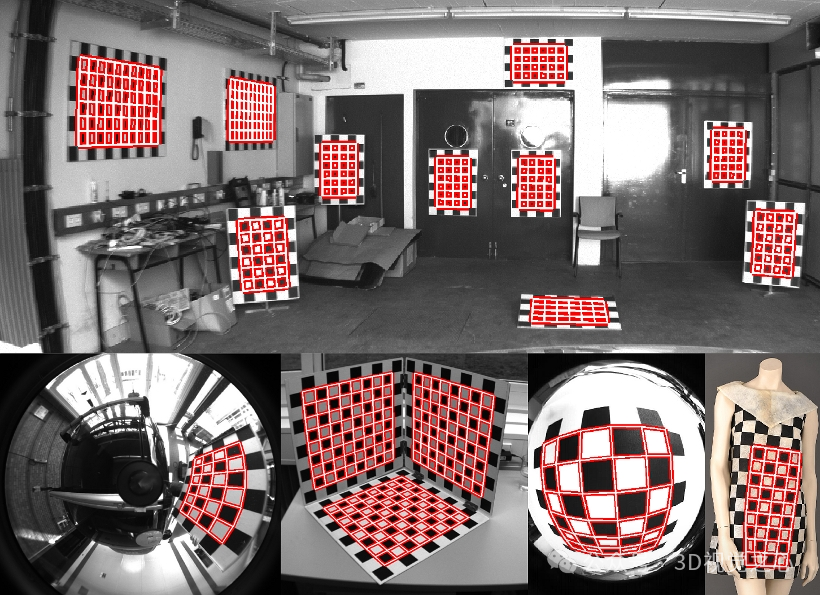
1.Libcbdetect
一次拍摄多棋盘格检测:https://www.cvlibs.net/software/libcbdetect/
使用MATLAB编写的算法能够自动提取角点并将它们精确到亚像素级别,并将这些角点组合成矩形棋盘状的图案。该算法具有处理不同类型图像(如针孔相机、鱼眼相机、全景相机)的能力。
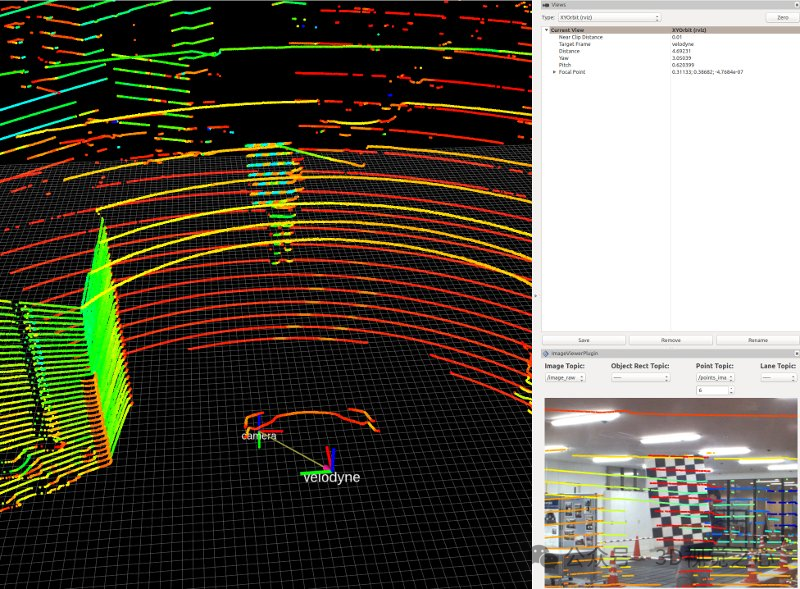
2.Autoware 标定包
Autoware 框架的激光雷达-相机标定工具包。
链接:https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator
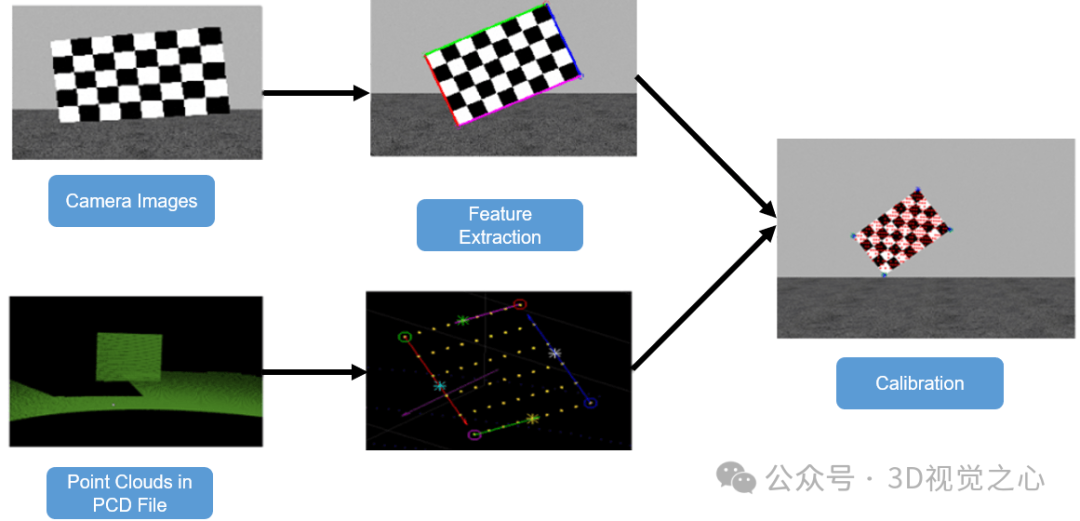
3.基于3D-3D匹配的靶标标定
基于3D-3D点对应关系的激光雷达相机标定,ROS包,出自论文《LiDAR-Camera Calibration using 3D-3D Point correspondences》!
链接:https://github.com/ankitdhall/lidar_camera_calibration
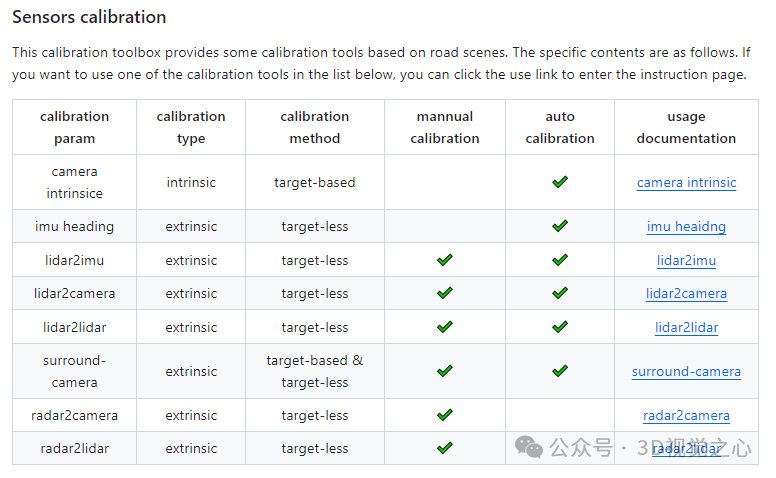
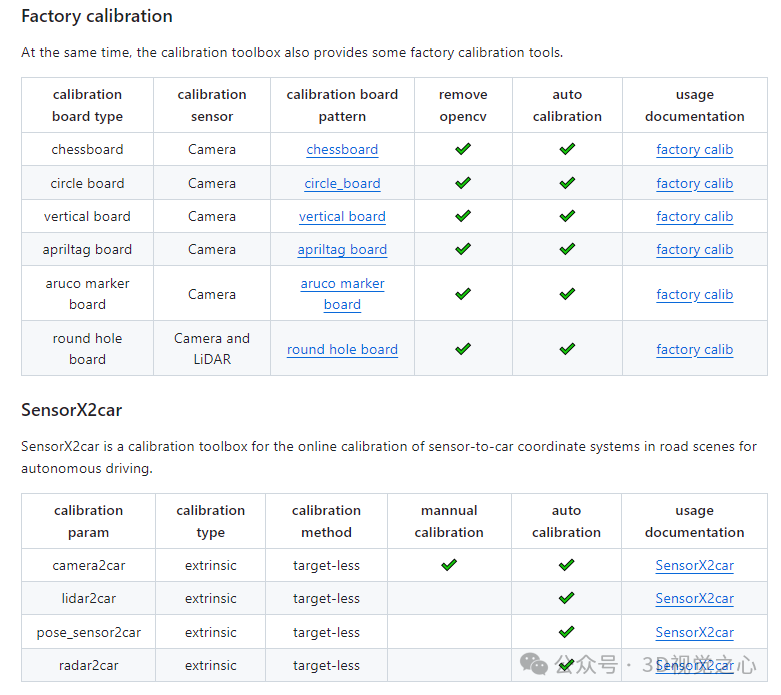
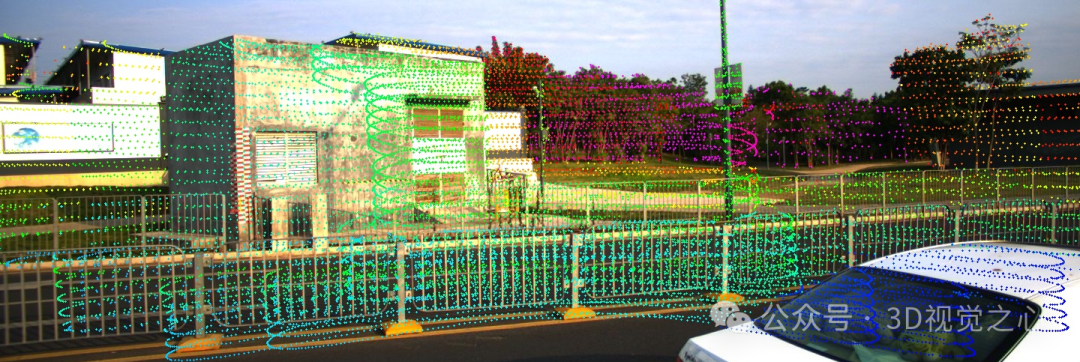
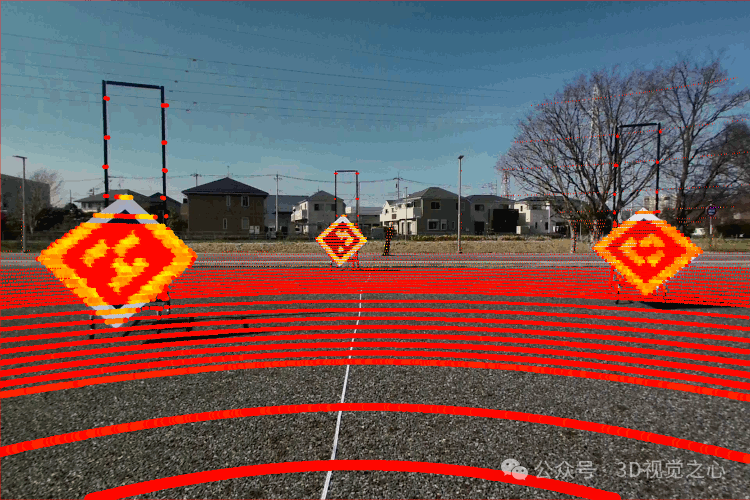
4.上海 AI Lab OpenCalib
上海人工智能实验室出品,OpenCalib提供了一个传感器标定工具箱。工具箱可用于标定IMU、激光雷达、相机和Radar等传感器。
链接:https://github.com/PJLab-ADG/SensorsCalibration
5.Apollo 标定工具
Apollo标定工具箱,链接:https://github.com/ApolloAuto/apollo/tree/master/modules/calibration
6.Livox-camera标定工具
本方案提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重复性扫描的特点,点云的密度较大,比较易于找到雷达点云中角点的准确位置。相机雷达的标定和融合也可以得到不错的结果。
链接:https://github.com/Livox-SDK/livox_camera_lidar_calibration
中文文档:https://github.com/Livox-SDK/livox_camera_lidar_calibration/blob/master/doc_resources/README_cn.md
7.CalibrationTools
CalibrationTools为激光雷达-激光雷达、激光雷达相机等传感器对提供标定工具。除此之外,还提供了:
1)定位-偏差估计工具估计用于航位推算(IMU和里程计)的传感器的参数,以获得更好的定位性能!
2)Autoware控制输出的可视化和分析工具;
3)用于修复车辆指令延迟的校准工具;
链接:https://github.com/tier4/CalibrationTools
8.Matlab
Matlab自带的工具箱,支持激光雷达和相机的标定,链接:https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html
9.ROS 标定工具
ROS Camera LIDAR Calibration Package,链接:https://github.com/heethesh/lidar_camera_calibration
10.Direct visual lidar calibration
该软件包提供了一个用于激光雷达相机标定的工具箱:可通用:它可以处理各种激光雷达和相机投影模型,包括旋转和非重复扫描激光雷达,以及针孔、鱼眼和全向投影相机。无目标:它不需要标定目标,而是使用环境结构和纹理进行标定。单次拍摄:标定至少只需要一对激光雷达点云和相机图像。可选地,可以使用多个激光雷达相机数据对来提高精度。自动:标定过程是自动的,不需要初始猜测。准确和稳健:它采用了像素级直接激光雷达相机配准算法,与基于边缘的间接激光雷达相机配准相比,该算法更稳健和准确。
链接:https://github.com/koide3/direct_visual_lidar_calibration
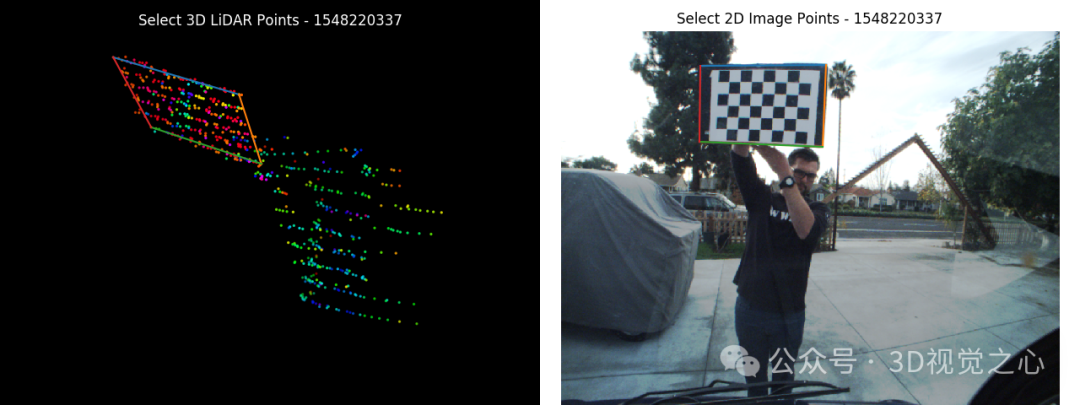
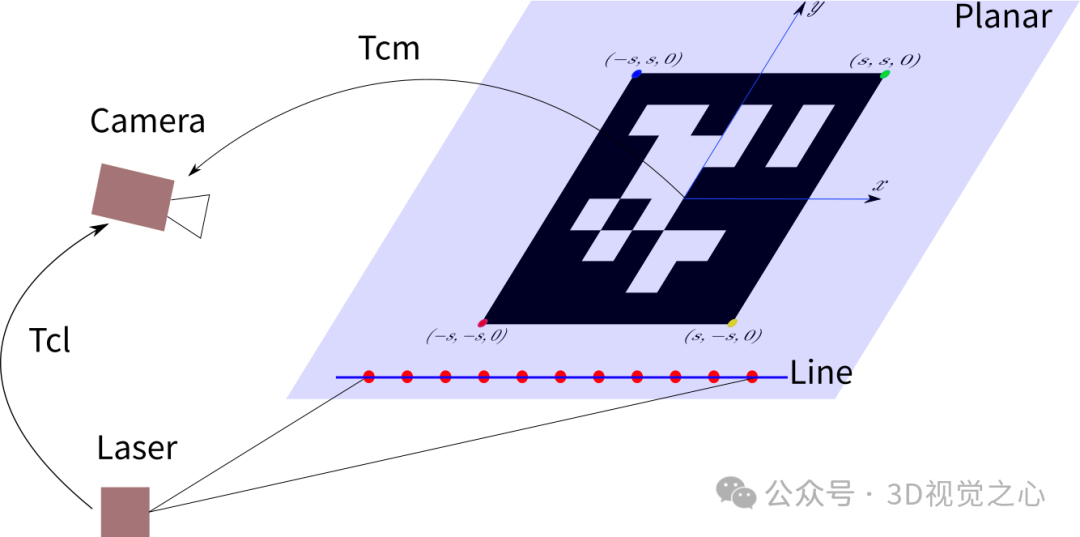
11.2D lidar-camera工具箱
这是一个基于 ROS 的单线激光和相机外参数自动标定代码。标定原理如下图所示,相机通过二维码估计标定板平面在相机坐标系下的平面方程,由于激光点云落在平面上,将点云通过激光坐标系到相机坐标系的外参数 转换到相机坐标系,构建点到平面的距离作为误差,使用非线性最小二乘进行求解。
链接:https://github.com/MegviiRobot/CamLaserCalibraTool
产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- 起亚中国首款高性能电动跑车EV6 GT正式发布
- 6月23日消息,起亚官方今日发布消息称,起亚中国即将推出旗下首款纯电动车型EV6。据悉,EV6将于6月28日在国内展开盲订,并计划于8月以进口车的形式正式在国内市场上市。EV6GT是起亚中国进军高端和性能细分市场的首款纯电动车型,被定位为"高能纯电轿跑"。该车型的设计充满运动感,包括专属的21英寸动感轮毂、荧光制动钳以及尾部扩散器装置,使车辆的运动基因得以彰显。为了提供用户更加环保和健康的乘坐环境,EV6GT的内饰采用了大量环保材质,如可回收材料和亚麻籽提取物,特别应用在座椅和地垫等部分。据小编了解,EV
- 8分钟前 起亚 0
-
 正版软件
正版软件
- 全球XR头显市场2023年第1季度出货量下降33%
- 7月5日消息,根据市场调查机构CounterpointResearch发布的最新追踪数据显示,2023年第1季度全球扩展现实(XR)头显的出货量同比下降了33%。这一数据表明,消费者对XR市场的兴趣正逐渐减弱。据报道,meta公司在XR头显市场依然保持领先地位。meta旗下的Quest系列头显在2023年第1季度的累计出货量超过2000万台,其中Quest2的出货量达到1800万台。然而,meta公司面临一个挑战,即Quest系列头显的出货量占比下降至49%,这是自2020年第4季度推出Quest2以来的
- 23分钟前 市场 XR头显 出货量 0
-
 正版软件
正版软件
- 可能错过高通骁龙8 Gen3芯片,Mate 60或将配备5G版本骁龙芯片
- 6月13日消息,华为近日宣布调整了2023年的出货量目标,预计将达到4000万台,展现出对即将发布的Mate60系列的极大信心。据了解,华为计划在今年推出全新的双旗舰战略,上半年发布P60系列,下半年发布备受期待的Mate60系列。Mate60系列预计将于今年9月份前后登场,引发了广泛的关注和期待。据小编了解,华为Mate60系列的标准版将采用高通骁龙8+芯片,而Pro版本则搭载高通骁龙8Gen2芯片。高通骁龙8Gen2是高通公司迄今为止最强悍的手机芯片,具备全新的“1+4+3”CPU架构。该芯片包括一个
- 38分钟前 华为 0
-
 正版软件
正版软件
- 小米新款手机系列"后稷"和"神农"研发之谜揭晓
- 6月25日消息,据数码博主@数码闲聊站的最新爆料,小米正在秘密研发代号为"后稷"和"神农"的新一代手机。这两个代号都与农业有关,显示出小米在新款手机中可能注重农业相关特性或功能的设计。消息透露,小米的新一代手机系列将注重用户体验、外观设计以及摄影功能。根据爆料,新款手机系列中的小米14Pro将配备一枚5000万像素的主摄像头,以及超广角和长焦镜头。前置摄像头将支持4K视频拍摄。此外,该手机将内置一块5000mAh容量电池,并支持高达100W的超级闪充技术。小米14Pro预计还将配备NFC、红外遥控、双扬声
- 53分钟前 0
-
 正版软件
正版软件
- 创维汽车发布HT-iⅡ/EV6Ⅱ新车型:注重环保与智能科技提升
- 6月25日消息,创维汽车旗下的HT-iⅡ/EV6Ⅱ两款车型近日正式上市。HT-iⅡ是插电混动版,售价区间为12.98万元至25.98万元;EV6Ⅱ则是纯电版,售价区间为15.68万元至28.98万元。新款车型在外观方面延续了创维HT-i和创维EV6的设计风格,不过进行了一些升级。内饰方面采用环保制造工艺,并增加了环保材料,同时新增了羊脂白玉内饰。该车还配备了尺寸更大的15.6英寸中控屏,边框更窄、色域更广,集成了全新自研的SKYlink2.0智能车机系统。车机搭载创维家电生态的酷开9.0系统,操作界面更加
- 1小时前 14:35 智能科技 创维汽车 环保内饰 0













